مكنسة كهربائية منزلية الصنع. مكنسة كهربائية منزلية الصنع.
قادرة على التحرك في جميع أنحاء الغرفة ، وتجاوز العقبات ، وجمع القمامة. لسهولة البناء وسهولة التجميع ، يتم استخدام الورق المقوى كمادة للقاعدة.

مواد وأدوات التصنيع:
- كرتون سميك (تحتاج إلى الكثير من القطع) ؛
- اردوينو (استخدم المؤلف نظيرًا مقابل 210 روبل) ؛
- نموذج بالحجم الطبيعي يكلف 80 روبل ؛
- جهازان لتحديد المدى بالموجات فوق الصوتية (تكلفة 300 روبل) ؛
- وحدة تحكم المحرك (80 روبل) ؛
- محركان تروس بعجلات (300 روبل) ؛
- حزمة بطارية مع وحدة تحكم الشحن 18 فولت ؛
- عدة أمتار من الزوج الملتوي ؛
- توربين من مكنسة كهربائية قديمة ؛
- مبرد من الكمبيوتر.
عملية التصنيع:
الخطوةالاولى. عمل قرص دوار للروبوت
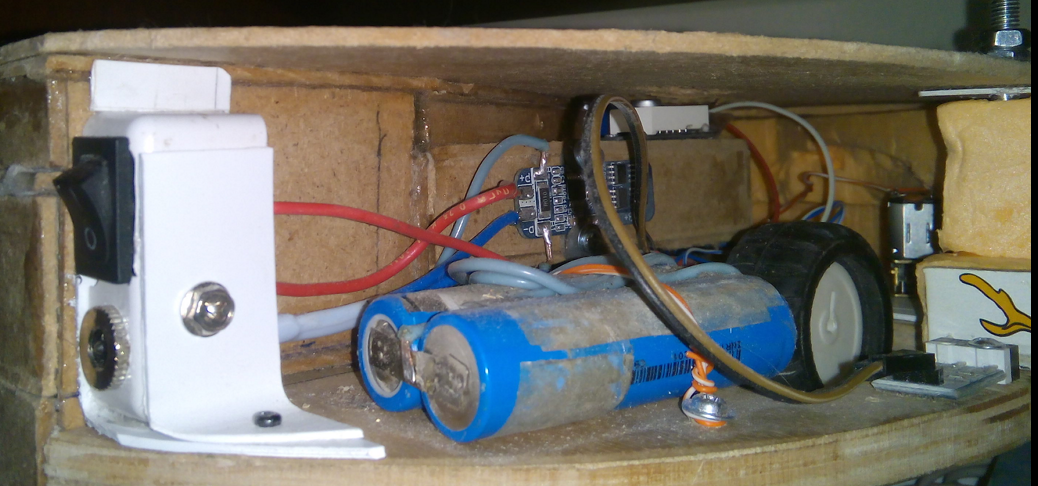
لأول مرة ، استخدم المؤلف دبابة من لعبة "Tank Battle" ، وتم التخلص من جميع الأجزاء غير الضرورية من اللعبة ، ولم يتبق سوى الجسد ، وكذلك المحركات والعجلات. بعد ذلك ، تم تثبيت Arduino UNO وسائق محرك وجهاز تحديد المدى بالموجات فوق الصوتية. تم استخدام ثلاثة كمصدر للطاقة. بطاريات الليثيومبنسبة 3.7 V.
كان لهذا التصميم عدد من العيوب. على سبيل المثال ، نظرًا لحقيقة أن العجلات كانت خلف المنصة ، واجه الروبوت مشاكل في الدوران ، وغالبًا ما كان الروبوت ينزلق.
أيضًا ، نظرًا لسرعة الحركة العالية جدًا ، لم يكن لدى الروبوت أحيانًا الوقت للاستجابة لإشارات أداة تحديد المدى وتحطم.


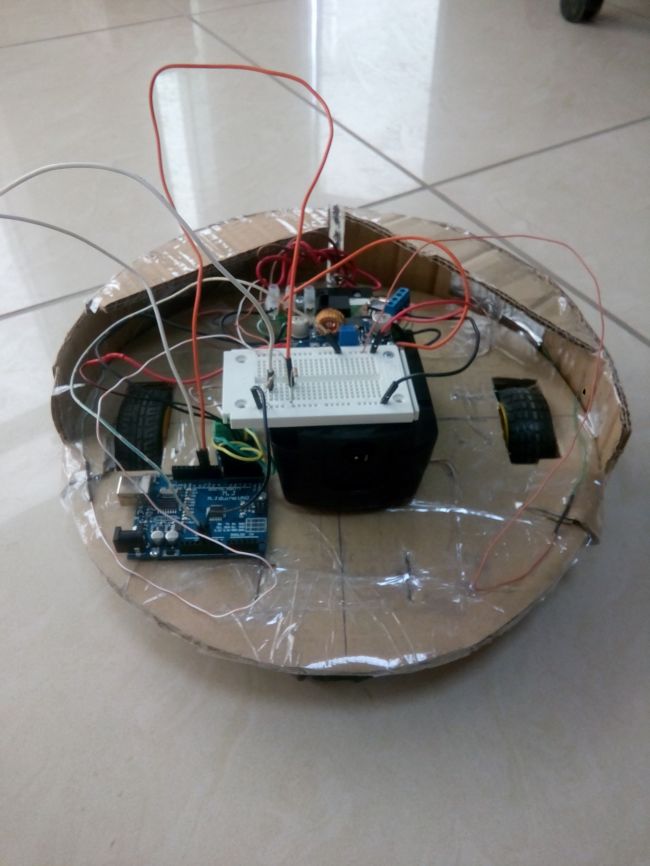
تم حل جميع المشكلات عن طريق تجميع منصة جديدة من الورق المقوى. للقيام بذلك ، قم بقطع دائرتين بقطر 30 سم ، ثم قم بلصقهما عبر الألياف. والنتيجة هي هيكل منحني قوي إلى حد ما. أما بالنسبة للمحركات وعلب التروس ، فقد تم أخذها من منتج سابق محلي الصنع.
الخطوة الثانية. نصنع مجسات
في البداية ، تم توجيه الروبوت بواسطة أدوات تحديد المدى ، لكن المؤلف لم يعجبه عملهم وفي النهاية تقرر التخلص منهم. تم استبدالها بمصدات التلامس ، بينما بدأ الروبوت في التصرف بشكل أكثر ملاءمة ، ويتطلب استثمارات أقل.



مصدات الاتصال مصنوعة بكل بساطة. تحتاج إلى أن تأخذ ورق مقوى وورق غراء على جانب واحد منه ، وستكون هذه هي جهة الاتصال الأولى. يجب أن يتم تطبيق جهد +5 فولت على هذا الرقاقة ، ومقابل المنصة ، يجب تثبيت سلك منحني من زوج ملتوي ، ويتم توصيله من خلال المقاوم ، ونتيجة لذلك سيكون هناك عدد أقل من الإيجابيات الخاطئة. عندما يصطدم الروبوت بشيء ما ، ستغلق جهات الاتصال ، وبعد ذلك ستحول الإلكترونيات الروبوت في اتجاه عشوائي آخر.
الخطوة الثالثة. نصنع مكنسة كهربائية ومجمع غبار
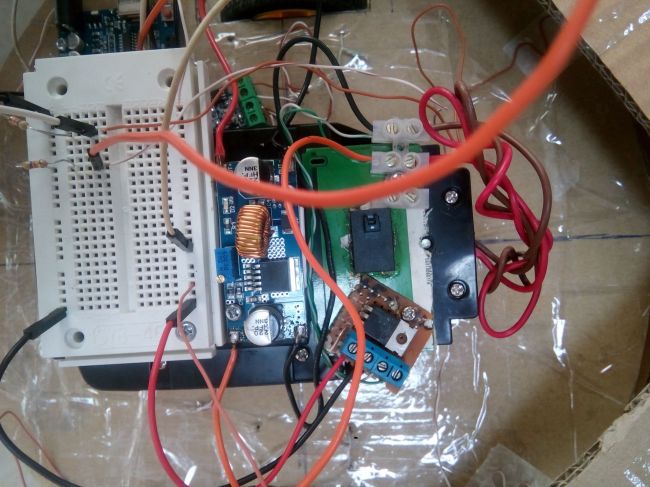
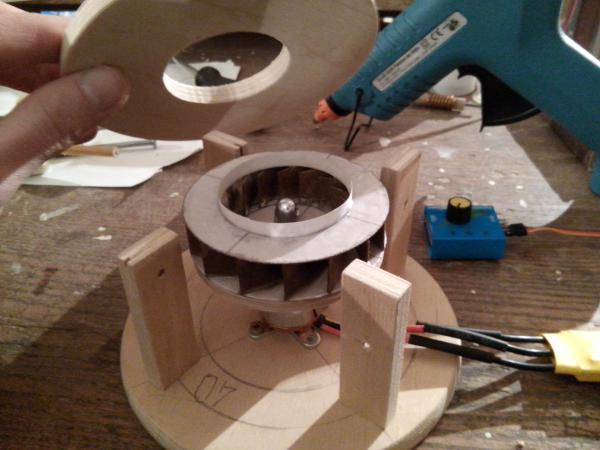
بفضل المواد مثل الورق المقوى والشريط اللاصق ، يمكنك تجميع أي تصميم تقريبًا بسرعة. لتشغيل التوربين ، يتم استخدام مصدر طاقة 18 فولت ، مباشرة من البطارية. تحت مثل هذا الحمل ، يتم تسخين المبردات ، لكنها تعمل.


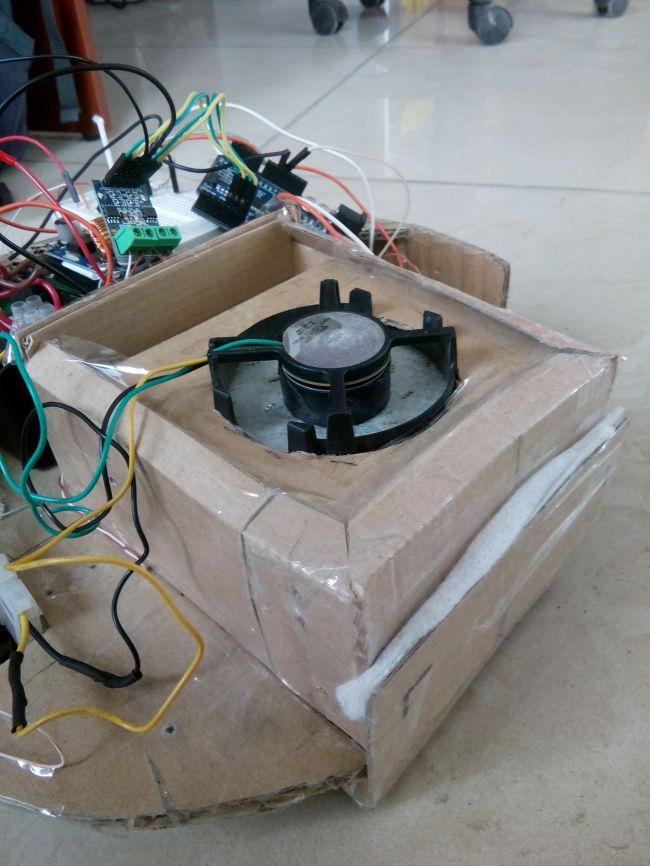



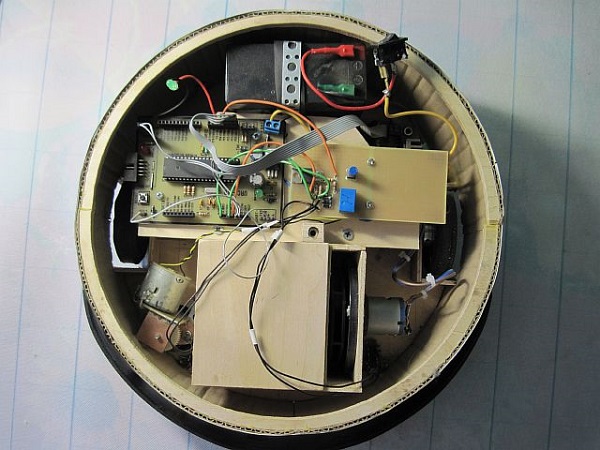
لتصنيع التوربين يتم أخذ مبرد من الحاسب ومن ثم يتم قطع جميع الشفرات منه. بعد ذلك ، يتم توصيل التوربينات من المكنسة الكهربائية بالمبرد ، ويجب لصقها بالغراء الفائق. أهم شيء هنا هو التمسك بالضبط ، فلا يجب أن يكون هناك خلل. بدون تحميل وقوة 18 فولت ، ينتج المبرد حوالي 2600 دورة في الدقيقة ، مما يخلق قوة جر ممتازة. في الختام ، يتم تجميع الهيكل بالكامل كما ترى في الصورة ، وبعد ذلك يمكن اختبار الروبوت.
أما بالنسبة لخوارزمية العمل ، فهي بسيطة للغاية. إذا اصطدم الروبوت بشيء ما ، فإنه يتحول إلى زاوية عشوائية.
في المستقبل ، يخطط المؤلف لجعل المنصة من الخشب الرقائقي بحيث تكون أقوى. هناك أيضًا خطط لتثبيت فرشتين في الأمام لجمع القمامة بشكل أكثر كفاءة. يمكن توجيه الهواء المنفوخ أسفل المنصة لتجميع الغبار بشكل أكثر كفاءة.
لا تتطور المكنسة الكهربائية الآلية بمصدر طاقة مستقل ، بالطبع ، مثل الإصدار اليدوي. أظهرت الاختبارات العملية كفاءة عالية عند استخدام فرشاة صغيرة مع توربين شفط. بالنسبة تنظيف الزاويةتم تجهيز الجزء الأمامي من المكنسة الكهربائية بفرشتين ، والتي ، عند العمل ، تلتقط الحطام إلى الفرشاة الرئيسية.
يمكن تشغيل النظام الآلي من عدة بطاريات ، الجهد عند أطرافها هو 12 فولت (18 فولت) ، وقدرتها 7 أمبير. يتم الشحن عن طريق الاتصال المباشر أو لاسلكيًا. يزيد استخدام الأخير من تكلفة الأجزاء المكونة.
تعد العودة الذاتية للروبوت إلى مكان الشحن مهمة صعبة يمكن حلها عن طريق تثبيت منارة إرسال.
أي نموذج آلي يعمل تحكم قائم(دماغ النظام). لذلك ، يجب عليك دراسة لغة البرمجة الخاصة بها لإدخال خوارزمية الأوامر. يجب أيضًا أن تأخذ في الاعتبار التوجيه البديهي لواجهة الأوامر ، مما يسهل العملية إلى حد كبير. غالبًا ما يكون لكل من المتحكم الدقيق وأجهزة الاستشعار المستخدمة موصلات موحدة للتوصيلات ، لذلك نادرًا ما يكون اللحام مطلوبًا.

التحضير للتنفيذ العملي للمشروع
ضع في اعتبارك تطبيق المبادئ المذكورة أعلاه بناءً على منصة Arduino Mega 2560. ستتألف عملية الإنشاء من عدة مراحل:
- تحضير الأدوات والمواد ؛
- إنتاج جسم بعجلات وقسم للقمامة ومجمع غبار وتوربينات ؛
- تركيب أجهزة الاستشعار والميكروكونترولر والمحركات مع علب التروس والبطاريات والفرش ؛
- عمل التوصيلات الكهربائية
- إدخال البرنامج في Arduino ، وتحديد تناسق أجهزة الاستشعار ؛
- التحقق من أداء المكنسة الروبوتية وقدرتها على شحن نفسها.
يتم تنفيذ الفكرة باستخدام المواد والأدوات التالية:
- وحدة تحكم اردوينو - 1 جهاز كمبيوتر ، مع برامج تشغيل ؛
- لوح خشب رقائقي (أو كرتون سميك) - 1 متر مربع ؛
- عجلات - 3 قطع ؛
- سلك مع مقطع عرضي لا يزيد عن 0.75 مم كيلوفولت (زوج مجدول مناسب) - حوالي 2 متر ؛
- مزود الطاقة - 4 بطاريات 18 فولت ، مؤشر الشحن لها ، شاحن ؛
- مستشعرات الأشعة تحت الحمراء - 4 قطع ، الاتصال - 2 قطعة ؛
- المحركات الكهربائية: للتوربينات - 1 جهاز كمبيوتر ، تدوير الفرشاة - 1 جهاز كمبيوتر ، يوفر محركان مع علبة تروس الحركة ؛
- حالة البولي فينيل كلوريد - 1 قطعة ؛
- غراء - عبوة واحدة ، براغي ذاتية التنصت - 10 قطع ، شريط لاصق - 1 قطعة ، مجموعة مغناطيس ؛
- مجموعة من المفكات والمثاقب ، كماشة ، سكين القرطاسية ، قلم رصاص ، مسطرة ، مفك البراغي ، بانوراما كهربائية.
تجميع المكنسة الروبوتية
بعد أن أعددت كل ما تحتاجه ، يمكنك البدء في التجميع. وهو يتألف من المرور بالخطوات المذكورة أعلاه.
تتمثل إحدى نقاط العمل المهمة في عودة المصد إلى موضعه الأصلي بعد اصطدامه بعقبة ، أي مرونته الكافية.
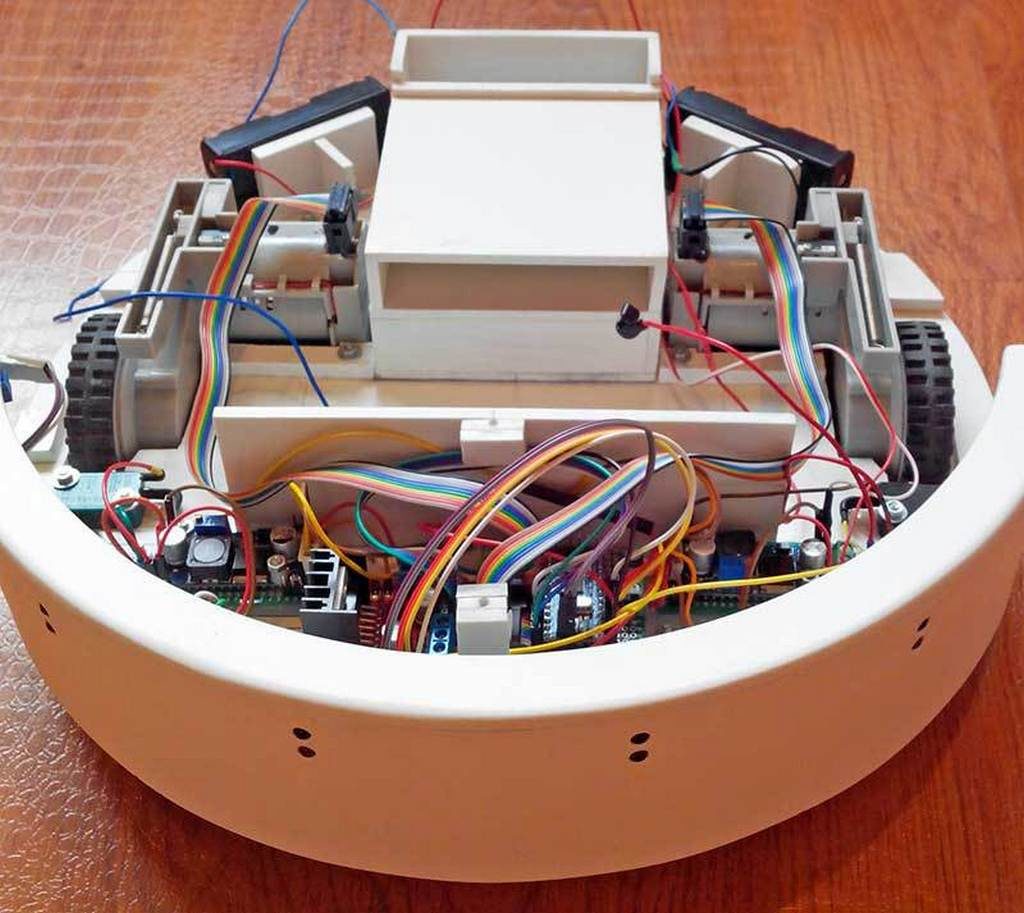
يتم تثبيت جميع الأجزاء على الموصلات المتاحة لهذه الأغراض بمسامير ذاتية التنصت أو غراء أو شريط لاصق. تظهر النتيجة في الصورة:
تتناول هذه المقالة كيفية تجميع مكنسة الروبوت الخاصة بي. هناك الكثير من الصور ومقاطع الفيديو هنا لأولئك الذين يشتعلون أيضًا بهذه الفكرة.
19 ديسمبر 2014. بدأت اهتم بالمكانس الكهربائية الروبوتية منذ خمس سنوات في عام 2009 ، ربما بعد أن تعرفت على Roboforum. كل هذه السنوات كانت هناك محاولات لبدء شيء ما ، لكن لم يتم فعل شيء. قبل شهرين ، قرأت بنشاط مقالات حول مكنسة كهربائية روبوتية وقررت أخيرًا أنني سأشتري كارتشر RC 4.000. مر الوقت ، بدأت زوجتي في كثير من الأحيان بتنظيف المطبخ والممر ، وبدأت تزعجني ، ونمت فكرة الروبوت أقوى. قضيت عدة أمسيات مرة أخرى في الصور والمنتديات حول المكانس الكهربائية الروبوتية. قررت أخيرًا أنني سأصنع روبوتًا بنفسي!
الهدف هو إنشاء مكنسة كهربائية روبوتية ليست أسوأ من مكنسة صناعية والتخلص من طبقة من الغبار والحطام الصغير في المنزل. أثناء دراسة هيكل الروبوتات ، اتضح أنها صاخبة جدًا ، حوالي 60 ديسيبل ، بينما تنتج المكنسة الكهربائية الثابتة لغسيل المنزل حوالي 80 ديسيبل. يجب أن يعمل الروبوت الخاص بي بهدوء قدر الإمكان ، ويجب ألا تتجاوز أبعاده أبعاد روبوتات المصنع ، ويجب أن ينظف بسرعة وكفاءة.
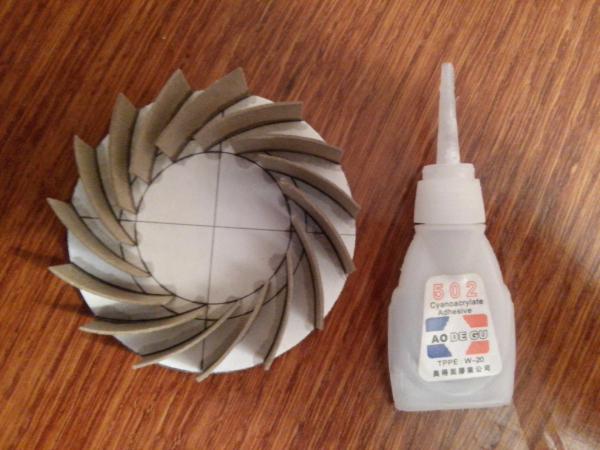
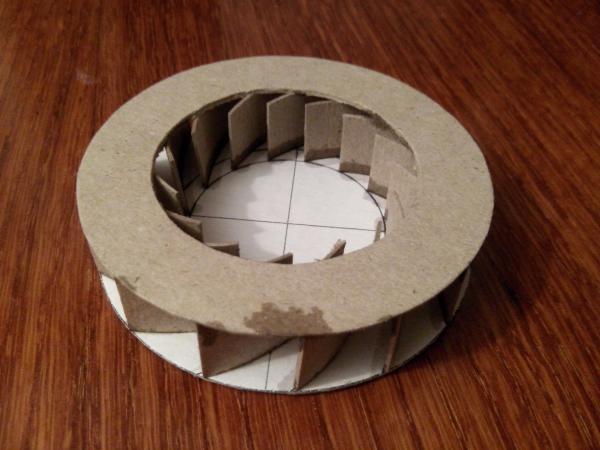
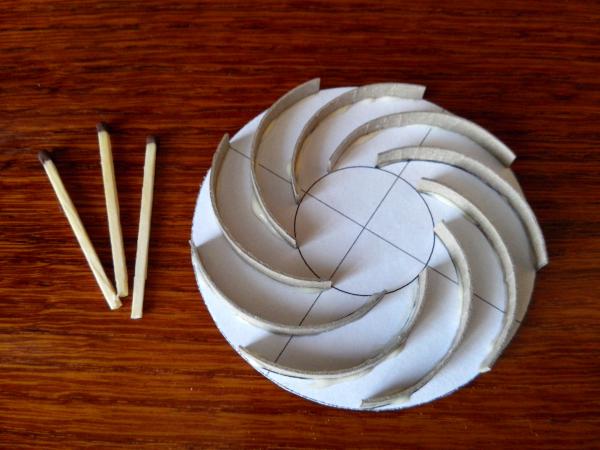
كان أول شيء يجب فعله هو حل مشكلة توربين الشفط. لدي بالفعل خبرة في بناء التوربينات ، لكنهم جميعًا كانوا يعملون بشكل سيء. بالنسبة إلى المرآب ، صنعت مكنسة كهربائية منزلية الصنع من توربين من مكنسة كهربائية قديمة من Rocket. يحتاج الروبوت إلى توربين صغير ، لذا بدأت في البحث مرة أخرى. بالصدفة ، وجدت رسائل من المستخدم فوفان على Roboforum ، شارك رسمًا لتوربينه. دون تردد ، أعدت رسم الرسم ولصق التوربين الخاص بي.
لقد قطعت التوربين وألصقته من الورق المقوى السميك بالغراء الفائق في 20 دقيقة. كانت الاختبارات الأولى ناجحة!



20 ديسمبر 2014. اشتريت تقشير الجسم اليوم :) بشكل عام ، أحتاج فقط إلى جرة شفافة بغطاء لولبي ، أعطيت المحتويات لزوجتي. لقد اشتريت أيضًا فرشاة للملابس ذات شعيرات خشنة ، وقمت بتفكيكها ، وغدًا سأقوم بإخراج فرشاة منها لروبوتي.

في AutoCAD ، قمت بعمل رسومات تخطيطية لموقع العناصر في الجسم. لقد استقرت على أبعاد الحوض التي يبلغ قطرها 25 سم وارتفاعها حوالي 9 سم. ولم يتضح بعد ما إذا كانت جميع العناصر ستناسب ، فهناك مساحة صغيرة حقًا ، لكنني لا أريد أن أجعل القضية بعد الآن. أضع إطاري الخاص :)
بالأمس كتبت على الإنترنت أبعاد المكانس الكهربائية الروبوتية للمصنع:
القطر * الارتفاع (سم)
36 * 9
32 * 8
32 * 10
30 * 5
22 * 8
قررت أن أجعل المكنسة الكهربائية الخاصة بي مزودة بفلتر حلزوني ، بحيث لا يمكنك جعل الارتفاع صغيراً ، يتم تحديده بواسطة سلة المهملات ، ولكن يمكنك الفوز بالقطر. بالطبع ، بفضل دايسون على الإعصار ، كنت أراجع اختراعاته لفترة طويلة وصنعت مكنسة كهربائية للجراج على مبدأ الإعصار. سيكون الفلتر الخاص بي بسيطًا ، بدون أي أقماع وقوة شفط مجنونة ، لأول مرة سيفعل.
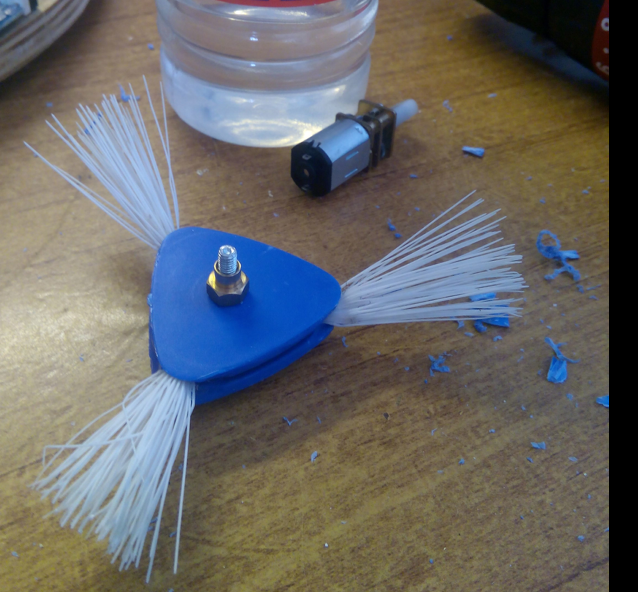
21 ديسمبر 2014. لقد قطعت مقبض دائري طوله 15 سم من فرشاة أرضية في المرآب وصنعت منه فرشاة مستديرة. اتضح أن القطر يبلغ حوالي 70 ملم. الحجم كبير بشكل غير واقعي والشعيرات شديدة الصلابة ، ولا أعرف كيف سيتصرف ، لكن ربما سأضطر إما إلى إعادة المكنسة الكهربائية أو جعلها أثقل ، لأن الشعيرات ستلقي بها. تم إدخال الشعيرات ببساطة في الثقوب بدون غراء ، اتضح أنها موثوقة. لقد قمت بتثبيت الهيكل بأكمله على مسمار قطره 6 مم ومحملان على طول الحواف.
لقد وجدت عجلتين في المرآب ، لن تصدقوا ، من مكنسة كهربائية! المكنسة الكهربائية المحمولة نفسها التي لا يوجد فيها شيء كهربائي ، فقط 4 عجلات وفرشتان تعملان بهذه العجلات. كانت العجلات تنتظر في الأجنحة منذ حوالي 15 عامًا :)

الآن في AutoCAD سأقوم برسم آخر لعدة أجزاء ، وغدًا سأقطع كل شيء من الخشب الرقائقي وأحاول تجميع شيء بالفعل على الأساس.
22 كانون الأول (ديسمبر) 2014. أريد حقًا صنع مكنسة كهربائية روبوتية بيدي وإنهائها قبل العام الجديد 2015. شاهدت الليلة الماضية عدة مقاطع فيديو حول المكانس الكهربائية الروبوتية مرة أخرى على YouTube ، وعلى وجه الخصوص مقطعي فيديو عن Dyson 360 Eye ورقيق:
بعد الفيديو الأول باستخدام روبوت دايسون ، أدركت أنه عند صنع روبوتي بقطر 25 سم وفرشاة بطول 15 سم ، سأترك أماكن متسخة على طول القاعدة بعرض 5 سم. لا أعرف ماذا سأفعل بعد ذلك ، ستظهر الاختبارات.
لذلك ، اشتريت اليوم مجرفة جديدة وفرشتين بشعيرات أكثر نعومة. اشتريت السبق الصحفي بسبب الشريط المطاطي الملتصق حول الحافة ، فهو مثالي لتصميمي.

تم تغيير هندسة العلبة قليلاً بناءً على أفكار جديدة وفرشاة جديدة. لا يزال حجم الروبوت 25 سم ، لكنه الآن نصف دائرة ونصف مربع. يبلغ عرض الفرشاة 21 سم ، والقطر حوالي 6 سم.وقد قطعت القاعدة من الخشب الرقائقي 8 مم ، والعجلات المرفقة والفرشاة ، وغدًا سأصنع علبة تروس وأحاول مسح شيء ما :)

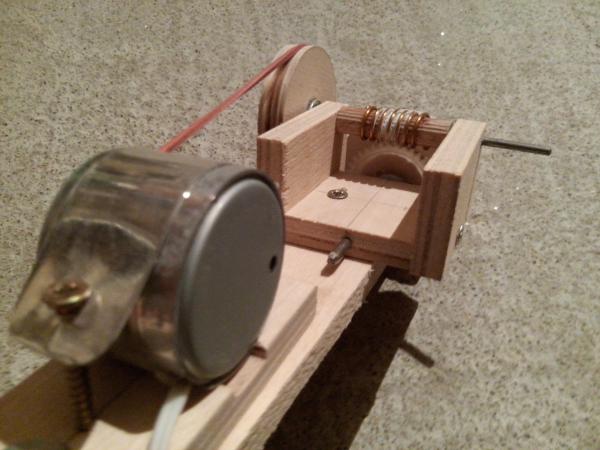
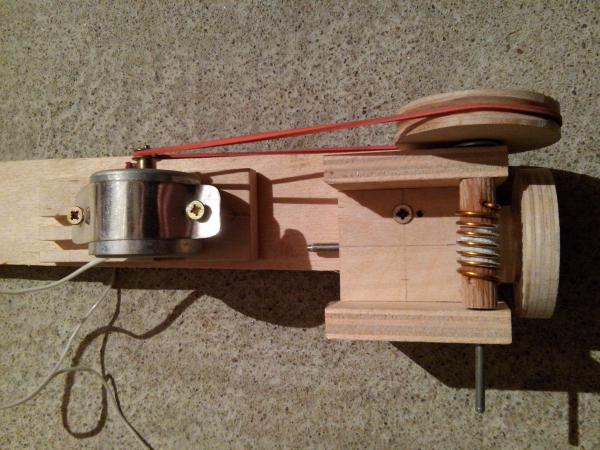
23 ديسمبر 2014. لقد قمت بربط ترس بالفرشاة وربطت علبة تروس قريبة ، واستخدمت شريطًا مرنًا للمال كحزام ، وقمت بربط المحرك بمسمار للاختبار. يوجد أدناه اختبار فيديو عند 6 و 9 فولت.
على الأرجح سأعيد الفرشاة مرة أخرى ، فالكومة قصيرة جدًا وقاسية جدًا. يجب أن تكون الكومة خالية من الفجوات ، لأن هناك خطوطًا من الأوساخ. بشكل عام ، اتضح أنه مذهل :)
اكتشفت ما إذا كان لدي مساحة كافية لثلاثة محركات في العلبة. محركان يدوران عجلتين وفرشاة واحدة. بالإضافة إلى ذلك ، تستهلك علب التروس مساحة كبيرة. جاءت الفكرة لاستبدال مخفضات التروس بآلة دودة ، ربما سأقوم ببعض الاختبارات.
توربينة الشفط كانت مطلية مرتين بطبقة من راتنجات الايبوكسي ، أصبحت مثل البلاستيك. لم يعد الورق المقوى ينحني ، وإذا دخلت المياه ، فسيكون كل شيء على ما يرام. لم أكن مضطرًا لتوسيطه ، فهو يدور بشكل مثالي. في غضون ذلك ، أقوم بإعداد الأساس لصندوق القمامة. لقد صنعت مرشحًا جيدًا من الرقبة وغطاء زجاجة الكفير. كقطعة قماش مرشح ، أخذت كيسًا يمكن التخلص منه من مكنسة كهربائية. بينما يتم لصق كل شيء ، سأقوم في غضون يومين بتثبيته على القاعدة واختبار كل شيء مرة أخرى.

أثناء العمل على الروبوت ، تتبادر إلى الذهن فكرة الحصول على طابعة ثلاثية الأبعاد. باستخدام طابعة ثلاثية الأبعاد ، سيكون من الأسهل بكثير إنشاء مثل هذه التفاصيل التي أحتاجها وبدقة عالية. عندما تقوم بحفر الخشب الرقائقي باستخدام مثقاب ، يمكن أن يؤدي الحفر بعيدًا أو لا يكون المنحدر 90 درجة بالضبط ، وهنا لا يمكن للمرء إلا أن يحلم بدقة عالية. بالإضافة إلى ذلك ، أجزاء الخشب الرقائقي ضخمة جدًا ، كل شيء سيكون أنيقًا على طابعة ثلاثية الأبعاد.
24 ديسمبر 2014. في الصباح اختبرت التوربين وعلبة القمامة ، في فترة ما بعد الظهر كررت التجربة بجهد أعلى. النتائج ليست مبهرة. كان لابد من فك الفلتر الدقيق في الوقت الحالي ، لأن الطاقة تنخفض بحدة من خلاله. في البنك ، يتم تدوير القمامة بشكل فعال للغاية ، ولكن في الواقع لا توجد قوة شفط كافية.
اختبار التوربينات ذات الجهد العالي.
في هذه اللحظات ، كانت هناك رغبة في تسجيل كل شيء ، فلماذا أخذتها على الإطلاق. الآن أصبح من السهل جدًا ترك كل شيء والنسيان - هذه هي أسهل طريقة.
في المساء ، أخذت محركًا بدون فرش وبدأت في لصق توربين جديد له وفقًا لنفس الرسومات.
25 ديسمبر 2014. لقد قمت بلصق التوربين الثاني لمحرك بدون فرش ، وأردت اختباره ، وتبين أن المحرك يدور في الاتجاه الخاطئ. غدًا سأذهب إلى المرآب لألحم الأسلاك ، لكنني الآن أضع كل شيء جانبًا.
26 ديسمبر 2014. الأسلاك الملحومة بين وحدة التحكم والمحرك ، حصلت على الدوران في الاتجاه الصحيح. بدأ التوربين في العمل ، لكن تبين أن إجراء اختبارين للركبة كان حزينًا مرة أخرى. ربما حتى إعادة تصميم التوربين ، مضيفا قليلا تفتق ، ولكن المزيد عن ذلك في وقت لاحق.
في اليومين الأخيرين قضيت القليل من الوقت في التطوير ، سأحاول تخصيص 4-5 ساعات غدًا.
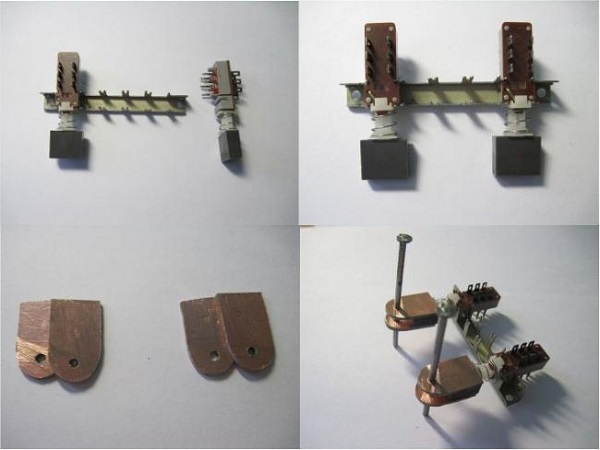
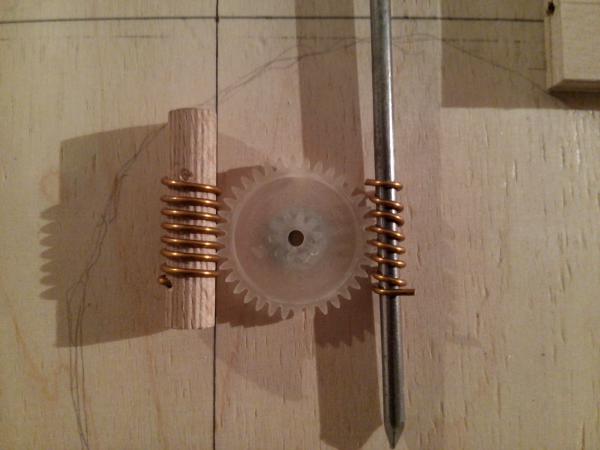
27 ديسمبر 2014. قررت أن أحاول تجميع ترس دودي للهيكل السفلي لمكنسة كهربائية آلية. في الصور السابقة ، أوضحت أنه يمكنك صنع دودة من مسمار وقطعة من الأسلاك النحاسية. تبين أن المشكلة تكمن في عملية لحام السلك بالظفر. مكواة اللحام الخاصة بي ليست قوية جدًا ، لذلك قمت أيضًا بتسخين الظفر موقد غاز. ومع ذلك ، لم يكن من الممكن لحام السلك بجودة عالية ، لذلك أخذت قطعة مستديرة من الخشب ولفت السلك حولها ، وانسكبت المنعطفات بالغراء الفائق. اتضح أن الدودة مقبولة تمامًا. تجاهل الشكل البيضاوي للقاعدة الخشبية ، وبشكل عام ، كتلة الخشب الرقائقي بأكملها ، عملت الآلية بشكل طبيعي ، لكن الفطيرة كانت بطيئة للغاية.
سيكون من الجيد الحصول على تروس دودية بلاستيكية جاهزة ، لكن في الوقت الحالي سنضع هذا جانبًا.
فيما يتعلق باستهلاك الطاقة في المستقبل لروبوتي. الآن هناك عقبة في التوربين ، شيء لا تريد أن تمتصه كما ينبغي ، حتى مع إزالة الفلتر الناعم. إذا كنت تستخدم محرك تجميع تقليدي للتوربين وقمت بتزويده بجهد 12 فولت ، فسوف يستهلك حوالي 0.6 أمبير. إذا كنت تستخدم محركًا بدون فرش ، فسوف يستهلك حوالي أمبير واحد. بالإضافة إلى ذلك ، سيتم استخدام محركي تجميع لتحريك الروبوت وآخر للفرشاة ، سيستهلك كل منهما حوالي 0.3 أمبير. سوف تستهلك الإلكترونيات أيضًا شيئًا ما. في المجموع ، سوف "يأكل" الروبوت من حوالي 1.6 إلى 2 أمبير ، في قمم ربما تصل إلى 2.5 أمبير. لا أعرف ما إذا كان هذا كثيرًا أم لا ، يبدو أن الروبوتات الصناعية تستهلك ثلاثة أمبير أو أكثر.
مرة أخرى قمت بمراجعة مجموعة من مقاطع الفيديو والصور بناءً على طلب "مبدأ تشغيل مكنسة كهربائية روبوتية". لقد وجدت صورة رائعة لتوربينات من مكنسة كهربائية منزلية عادية. قرأت في بعض المنتديات أنه كلما طالت ريش التوربين ، زاد الفراغ الذي يمكن أن يخلقه بسبب قوة الطرد المركزي.

28 ديسمبر 2014. اليوم قمت بلصق توربينين آخرين ، يختلفان فقط في السماكة. جعلت الشفرات أطول وقت ممكن. في الصورة أدناه ، أول توربين رفيع (ارتفاع الشفرة 5 مم) ، إنه هادئ جدًا في التشغيل ، لكنه لا يمتص :)
التوربين الثاني أكثر سمكًا (ارتفاع الشفرة 15 مم).
مرة أخرى في المرآب ، حاولت سحب الفرشاة على الأرض ، وغالبًا ما يتم إيقاف تشغيل المحرك من الحمل ، ولا تزال الشعيرات قاسية جدًا ، ولن يؤذي تقليل قطر الفرشاة. غدًا ، في أي طقس ، سأشتري فرشاة ذات شعيرات أنعم ، وسأذهب أيضًا إلى متجر الألعاب وأبحث عن سيارات بها ترس دودي لهيكل الروبوت.
في المرآب ، اختبرت توربينًا جديدًا بجهد 12 فولت ، واعتقدت أن 9 شفرات قد لا تكون كافية. في المنزل ، قمت بلصق التوربين الثالث في يوم بشفرات طويلة وكمية 15 قطعة ، أرفق صورة:

انتهى يوم آخر. قبل حلول العام الجديد ، لن يكون لدي الوقت لصنع مكنسة كهربائية كما هو مخطط ، لكني أريد أن أصدق أن كل شيء سيكون على ما يرام :)
29 ديسمبر 2014 ذهبت إلى متجر الألعاب اليوم بحثًا عن معدات دودة. في الطريق ، تذكرت لعبة ابنتي - حصان. لم تعجب ابنتي بهذا الحصان حقًا ، وبشكل عام ، لا أحبه أيضًا :) ولكن من ناحية أخرى ، لديه دودتان كاملتان و 4 + 4 تروس بالداخل.


ما زلت أنظر إلى متجر الألعاب ، ثم إلى المتجر الثاني واشتريت آلة تبديل هناك. لقد اشتريت السيارة ليس للآلية بقدر ما لعجلاتها ، فهم يتسلقون أي سطح. لم يكن هناك معدات دودية داخل الجهاز. من المحتمل جدًا أن أستخدم العجلات من أجل روبوت محلي الصنع ، لكن في الوقت الحالي أعطيت الآلة لابنتي - إنها مسرورة :)

في فترة ما بعد الظهر ، خطرت فكرة صنع مكنسة كهربائية آلية ، أي التصميم هو نفسه كما هو الحال الآن ، فقط لا يوجد توربين ، يتم جمع القمامة ببساطة في المقصورة. عندما كنت أبحث عن فرشاة جديدة ذات شعيرات أكثر نعومة في المتجر (لم أشتريها أبدًا) ، رأيت هذا بالصدفة:

اشتريت هذا الغطاء على الفور. هذا جسم إنسان آلي جاهز ، حديث وشفاف وحتى بدون عناصر غير ضرورية. لكن في الواقع ، هذا "غطاء لفرن الميكروويف" (قطره 24.5 سم) ، لا أعرف ما الذي يجب تغطيته به ولماذا ، ولكن يجب أن يكون الروبوت جميلًا :) ولكن المزيد عن ذلك في مقال آخر.
في المساء كسرت المخروط ، وأخرجت التروس وربطته بالروبوت ، اتضح أنه رائع! تشغل الآلية مساحة صغيرة وهي قوية بما يكفي لتحريك المنصة. بينما لم يتم جمع كل شيء ، لذلك ستكون الصور لاحقًا. في غضون ذلك ، أقوم بتغذية فكرة كيفية صنع فرشاة جديدة ، وتقليل قطرها إلى 3-4 سم واستبدال علبة التروس بالتروس باستخدام ترس دودي.
بالمناسبة ، لاحظ أنه يمكن إزالة الدودة من الألعاب الأخرى. لذلك كان لدينا فيل مكسور ملقى ، لكن من حيث المبدأ لا يهم ، الشيء الرئيسي هو الآلية ، والتي هي نفسها في العديد من الألعاب (السيارات والدبابات وغيرها) ، انظر الصور:


أوه نعم ، لقد نسيت أن أكتب عن التوربين الجديد ، فقد تبين أنه أكثر إنتاجية بشكل ملحوظ من التوربينات الأخرى. لتحسين تدفق الهواء ، أضفت أيضًا مخروطًا إلى منتصف التوربين.
5 يناير 2015. على الرغم من عطلة رأس السنة الجديدة ، حاولت طوال الأيام السابقة المضي قدمًا في عملي بطريقة ما. لقد قرأت الكثير من المعلومات حول الطابعات ثلاثية الأبعاد ، إذا كانت هناك طابعة من هذا القبيل في ترسانتي ، كنت سأطبع معظم التفاصيل منذ فترة طويلة. بينما في رأسي ، أضع خططًا للمستقبل حول كيفية تجميع طابعة ثلاثية الأبعاد بيدي.
اليوم صنعت فرشاة جديدة. أخذت عصا خشبية بقطر 10 مم وحفرت ثقوبًا في لولب. لقد أدخلت شعيرات في الثقوب وقمت بلحامها على الجانب الخلفي بموقد خشبي.

قمت بتجميع الهيكل ، حتى جربته ، يجف الغراء. لقد وضعت أيضًا فرشاة جديدة في مكانها ، واتضح أن هناك الكثير من العضادات ، بدونها لا توجد طريقة ، بعد كل شيء ، هذا هو أول روبوت لي. بالمناسبة ، تخليت عن الظهر المستطيل وصنعت قاعدة لحالة مستديرة. قراري مرتبط بإعادة التفكير في حركة الروبوت ، إذا تخيلنا أن الروبوت يتحرك على طول الجدار ويستند إلى شيء ما ، فعند قلبه يجب أن يقوم بمناورة بحركة للخلف ، لأن المربع سوف تنزلق الحمار على الحائط.
قضيت الكثير من الوقت في البحث عن حل لـ "رؤية" الروبوت. لا يناسبني المصد الميكانيكي كثيرًا ، فهو يفسد الصادم الخارجي ، على الرغم من أنه أبسط مخطط للكشف عن العوائق. استقرت على جهاز استشعار الأشعة تحت الحمراء. ليس من الممكن بعد تجميع المستشعر بسبب نقص أجهزة الترانزستورات الضوئية بالأشعة تحت الحمراء.
07 كانون الثاني (يناير) 2015. بالأمس ، وحتى الساعة 1 صباحًا ، قمت بتجميع روبوت لاختباره بطريقة ما على الأقل ، والتلاعب به :) بصفتي "الدماغ" ، أستخدم لوحة Arduino Pro Mini + واقي المحرك على رقائق L293E مع الربط (استخدمت هذا لوحة في أول مشروع لي للتحكم في المحركات عبر الإنترنت). يتم التحكم فيها عن طريق جهاز التحكم عن بعد الخاص بالتلفزيون. فيديو قصير:
يبدو التصميم سائلاً ، في الواقع ، جميع الآليات تقريبًا تتنفس بصعوبة. أدركت اليوم مدى صعوبة صنع روبوت بسيط ظاهريًا. في الوقت الحالي ، لدي مشاكل في جميع العقد تقريبًا ، يلزم إعادة صياغة عالمية لكل شيء تقريبًا.
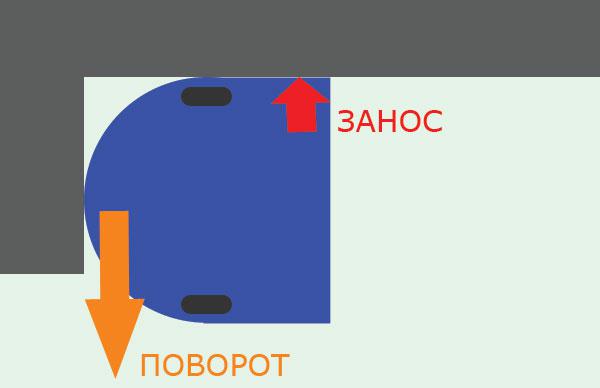
تبين أن الدفع بالعجلات على الترس الدودي هو ما نحتاجه من حيث السرعة ، لكن تنفيذه يترك الكثير مما هو مرغوب فيه. يتم وضع جزء من محرك الأقراص في حجرة حيث ستكون هناك حركة هوائية مع الحطام ، وهذا لن يعمل لفترة طويلة. على العجلات ، كنت أرغب في حفر ثقوب من شأنها أن تكون بمثابة مستشعر حركة إضافي. على جانب واحد من العجلة سيكون هناك IR LED ، وعلى الجانب الآخر ترانزستور ضوئي IR. ستنبض هذه الدائرة عندما يتحرك الروبوت ، إذا لم تكن هناك نبضات ، فإن الروبوت قد استراح على شيء ما ولا يتحرك.
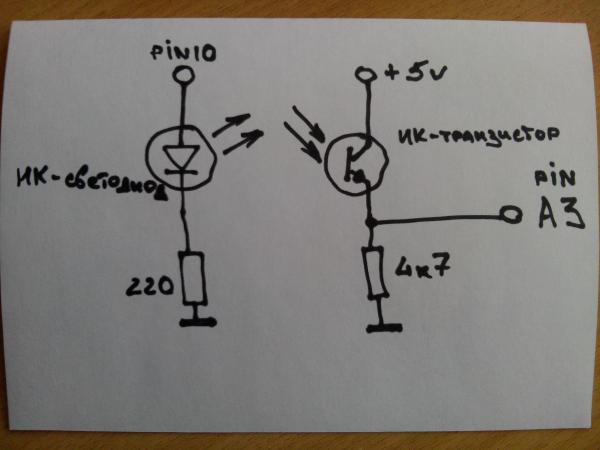
بالنسبة لأجهزة استشعار القرب ، اشتريت IR LEDs وترانزستورات الأشعة تحت الحمراء ، ولكن بعد اختبار مثل هذا الوفير IR ، أصبح من الواضح أن الفكرة كانت سيئة. يتفاعل المستشعر مع ضوء الشمس ، لكنه لا يرى الأجسام السوداء على الإطلاق. التصميم له الحق في الحياة ، ولكن في منتجات أبسط محلية الصنع. من هو المهتم بالمخطط الذي أشاركه:
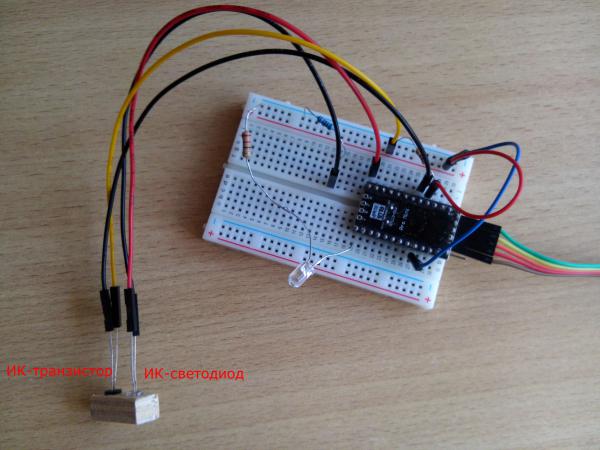
إذا قربت يدك من المستشعر ، فسيضيء مؤشر LED الموجود على اللوح.
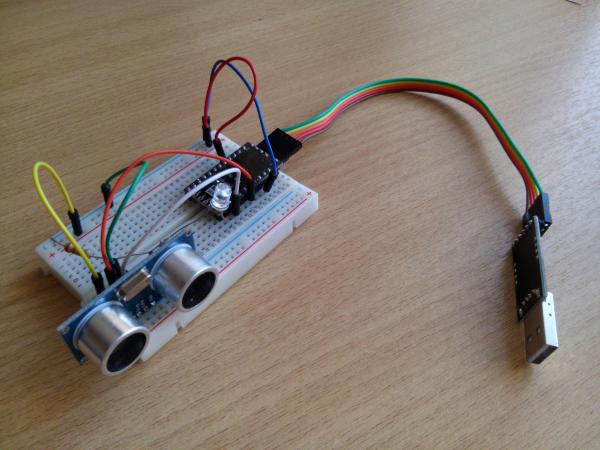
لقد جربت أيضًا جهاز الاستشعار بالموجات فوق الصوتية. إنه يقيس المسافة تمامًا ، ولكن فقط بطريقة "وجهاً لوجه" ، إذا كان مستوى الكائن بزاوية ، فإن القراءات مشوهة. بشكل عام ، حتى مع مثل هذا المستشعر ، لن يعمل ممتص الصدمات للروبوت بشكل طبيعي.
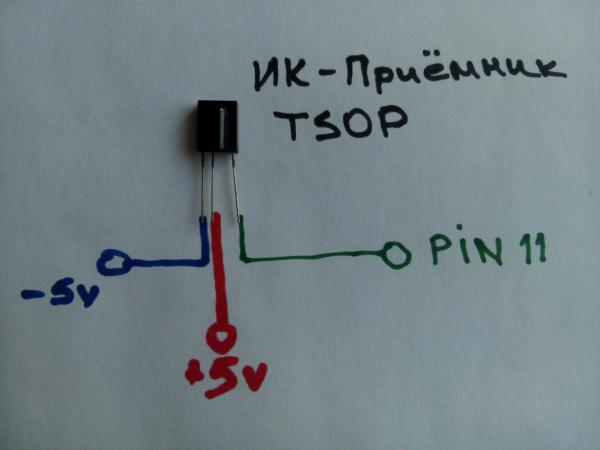
للتحكم من جهاز التحكم عن بعد ، تم استخدام مستقبل الأشعة تحت الحمراء TSOP ، ولا أعرف ما هي العلامات ، من حيث المبدأ ، يمكنك استخدام أي واحد يأتي عبر. يمكنك التحكم فيه من أي جهاز تحكم عن بعد ، حتى باستخدام ملفات جوالولكن قبل ذلك يجب أن تعرف أكواد الأزرار المراد الضغط عليها بجهاز التحكم عن بعد. يحتوي المخطط على دائرة بسيطة ترسل رمز الزر إلى شاشة المنفذ عند الضغط على جهاز التحكم عن بُعد. مثال على الاتصال ورسم تخطيطي أدناه:
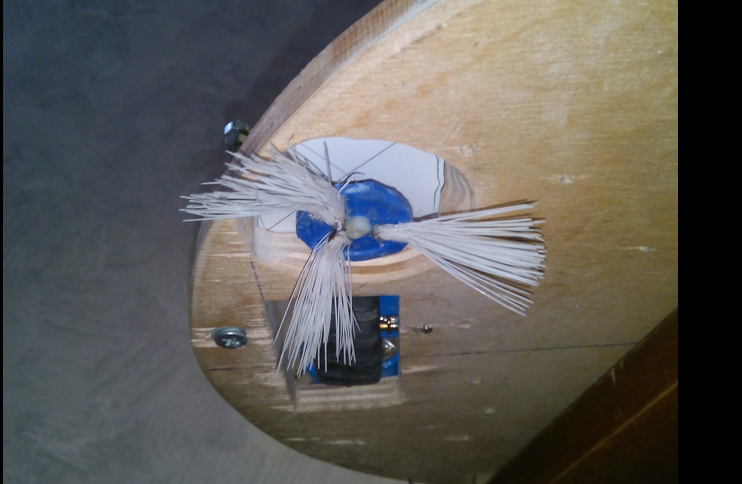
أما بالنسبة للفرشاة الكاسحة ، فقد اتضح أنها رائعة ، بعرض 21 سم تقريبًا ، وجسم 25 سم ، وهناك فروق دقيقة: الزغابات لا تتعافى إذا تم سحقها. آلية القيادة لا تغلق بأي شيء ، فتلف الشعر في 3 دقائق من التشغيل وتغلق. الفرشاة غير قابلة للإزالة. المحرك ضعيف جدًا ، لكن عدد الثورات مناسب جدًا ، فهو يكتسح بشكل فعال للغاية على الطاولة.


الآن سيتم تفكيك هذه المكنسة الكهربائية الروبوتية وإعادة التفكير فيها. على الأرجح ، سيزداد قطر الجسم بمقدار 3 سم.في البداية ، فكرت في صنع العجلات على تعليق مستقل ، بحيث يختبئون إذا قام شخص ما فجأة بالدوس على الروبوت. مع ذلك ، سأقوم بالدفع على التروس بدلاً من الدودة. يجب البحث عن كومة الفرشاة بأخرى أكثر مرونة وللحفاظ على شكلها. من المحتمل أن يتم عمل المصد ميكانيكيًا. الكثير من الأسئلة حول توربين الشفط.
على الرغم من كل أوجه القصور ، أحببت الزوجة الروبوت ، وكانت الابنة سعيدة بشكل عام :)
يتبع. لن أكتب عن الروبوت كثيرًا بعد الآن ، لكنني سأحاول نشر تقارير الصور والفيديو مرة واحدة على الأقل شهريًا.
مارس 2015. اشتريت مكنسة كهربائية.
المكنسة الروبوتية لا تزال في المشروع!
الآن تزداد شعبية منظفات المنزل الروبوتية كل يوم. هذا ما يبرره حقيقة أن هذه الأجهزة قادرة على الحفاظ على أغطية الأرضيات الخاصة بك نظيفة وفي نفس الوقت لا تأخذ وقتك.
يتمثل الاختلاف الرئيسي بينهما عن النظائر التي يتحكم فيها الإنسان في أن تنظيف السطح والحركة والاتجاه في الفضاء يتم تنفيذهما بواسطة الجهاز بشكل مستقل. تحقق ذلك بفضل وجود مستشعرات خاصة تتحكم في التغيير في وضع التشغيل والحركة وإعادة شحن المكنسة الكهربائية.
المشكلة الرئيسية هي أنه من الصعب للغاية شراء مكنسة كهربائية روبوتية من السوق الآن. لا يمكن اختيار نموذج مناسب في كل مكان ، وسياسة التسعير الخاصة ببعض المنفذين تناسب الجميع. ومع ذلك ، لا تيأس. لديك دائمًا فرصة للإبداع مكنسة كهربائية منزلية الصنع. بالطبع ، يعد صنع مثل هذا الجهاز بيديك وفي المنزل عملية طويلة جدًا تتطلب الصبر ومجموعة معينة من المواد والأدوات ، فضلاً عن مهارات العمل مع هذا النوع من المعدات. مخطط إنشاء مكنسة كهربائية روبوتية في المنزل مفهوم تمامًا حتى بالنسبة للهواة.ومع ذلك ، من الضروري الخوض في عملية إنشاء مثل هذه الآليات ومعرفة جميع الفروق الدقيقة في العملية القادمة. خلاف ذلك ، فأنت تضيع وقتك وأموالك فقط.
 مكنسة كهربائية روبوت DIY
مكنسة كهربائية روبوت DIY وصف مكنسة كهربائية روبوت محلية الصنع
إذا كنت ترغب في إنشاء آلية ستكون مثالية لتنظيف أسطح الأرضيات في منزلك ، فيجب أن تتبع بعناية جميع القواعد التي ينص عليها مخطط التجميع في الفقرة التالية.
إذا فعلت كل شيء بشكل صحيح ، فسيكون لديك نموذج يطابق هذا الوصف:
- قطر الجهاز 30 سم وارتفاعه 9 سم. يتكون الجسم من مادة البولي فينيل كلورايد الممتدة. في نفس الوقت ، يصل سمك العلبة نفسها إلى 6 ملم ؛
- يتم تثبيت 4 مستشعرات في المصد ، يتم من خلالها تحديد موضع المكنسة الروبوتية في الفضاء. في الوقت نفسه ، يوجد مفتاحان متصلان في حالة حدوث تصادمات غير متوقعة. الحواف منجدة بحشية مطاطية بحيث لا تتلفها في حالة الاصطدام العرضي بالأثاث ؛
- حاوية الغبار والحطام مصنوعة من PVC بسمك 4 مم. يتكون فلتر الغبار من 2 مناديل قماش عادية يمكن شراؤها من أي متجر منزلي. الغطاء ، الذي يحمي محتويات سلة المهملات ، متصل بالقاعدة بالمغناطيس ؛
- التوربين مصنوع من صفائح بلاستيكية رقيقة وشظايا من أقراص الكمبيوتر وكلوريد البوليفينيل ؛
- يتم تثبيت الغطاء العلوي للجهاز باستخدام superglue ؛

- تحتوي مستشعرات الأشعة تحت الحمراء على 4 مخرجات للاتصال بنظام Arduino. في هذه الحالة ، يعني الوضع العادي للعملية إصدار وحدة منطقية ، والحالة التي يتم فيها تشغيل مستشعر واحد على الأقل من النظام هي صفر منطقي ؛
- إذا كان مستشعر الأشعة تحت الحمراء لا يعمل ، ومع ذلك تعثر المكنسة الكهربائية على عقبة ، فإن مصدها سوف يضغط على المفتاح ، مما يتسبب في تراجع الجهاز بضعة سنتيمترات. بعد ذلك ، سيتم إجراء منعطف ، وسيستمر العمل. في الوقت نفسه ، هناك حاجة إلى مفاتيح قوية بما يكفي لضبط المصد في الوقت المناسب على موضعه الأصلي ؛
- المحرك المسؤول عن حركة الفرشاة الأمامية متصل بـ Arduino عبر MOSFET. في هذه الحالة ، عندما تكون المكنسة الكهربائية الروبوتية في حالة حركة ، تدور الفرشاة ببطء كافٍ بحيث لا ينتشر الغبار والأوساخ والحطام في جميع أنحاء الغرفة ، ولكن على العكس من ذلك ، يتجمعون معًا ويتم سحبهم إلى الكمامة. وإذا كان الروبوت بالقرب من حائط أو زاوية ، فإن الفرشاة تسرع من وتيرة عملها ، لأن معظم الغبار والأوساخ تتراكم فقط على طول الألواح ؛
- يتم تشغيل روبوت المكنسة الكهربائية بواسطة 4 بطاريات ليثيوم أيون ، بالإضافة إلى محول تنحي التيار المتناوب. كل زوج من بطاريات الليثيوم أيون أعلاه متصل في سلسلة ؛
- قاعدة الجهاز مصنوعة من الخشب الرقائقي عالي القوة ؛
- تصميم الجهاز يعني وجود 3 عجلات كروية ؛
- جميع فرش مكنسة الروبوت مصنوعة من خط صيد صلب إلى حد ما.
مخطط تجميع مكنسة كهربائية روبوتية في المنزل
لعمل مكنسة كهربائية روبوتية بشكل صحيح بيديك ، يجب أن تلتزم بالخوارزمية التالية (يجب تنفيذ المخطط بتسلسل محدد بوضوح):
- قم بتنزيل البرنامج المطلوب.إذا كنت ترغب في جعل المكنسة الكهربائية الروبوتية مشابهة قدر الإمكان لنظرائك في المصنع (بناءً على الوظائف التي تؤديها) ، فستحتاج إلى تنزيل البرنامج الضروري إلى متحكم Arduino. يمكن القيام بذلك باستخدام جهاز كمبيوتر شخصي عادي - ما عليك سوى تحميل الكود على لوحة Arduino.
- أصلح المكونات الرئيسية.من أجل تثبيت سيارات المكنسة الكهربائية الروبوتية والمبرد والدوائر الدقيقة والبطاريات وجميع حشوات الجهاز الأخرى بشكل آمن ، ستحتاج إلى قاعدة من الخشب الرقائقي. ستكون أيضًا أسفل المكنسة الكهربائية. هناك أيضًا توربين وحاوية لجمع النفايات تم لصقها مسبقًا مع الغراء الفائق. كما يجب أن تكون الحاوية مزودة بأنبوب خاص يتم من خلاله تفريغ الهواء المنفوخ. يجب حمايته بقطعة قماش كثيفة ، والتي ستكون بمثابة وسيلة للترشيح. يجب لصق المبرد بالتسلسل مع جميع الماكينات ، وبعد ذلك يجب وضعه على نفس منصة الخشب الرقائقي ، حيث يجب بالفعل تركيب الدوائر الدقيقة والبطاريات لتشغيل الجهاز. يمكن شراء عجلات المكنسة الكهربائية الآلية من السوق (ومع ذلك ، يمكنك محاولة صنعها بنفسك من علبة من الصفيح).
 الجزء الميكانيكي من مكنسة الروبوت
الجزء الميكانيكي من مكنسة الروبوت - تثبيت الوفير.في هذا النموذج ، وهي مصنوعة من البولي فينيل كلوريد. ومع ذلك ، فمن الممكن أيضا نظائرها المعدنية. في أي حال ، في حالة حدوث تصادم ، يجب أن يعمل جسديًا على المفتاح ، مما يؤدي إلى تحرك الجهاز في الاتجاه الآخر. وتجدر الإشارة أيضًا إلى أنه بعد الاصطدام ، يجب أن يعود المصد إلى مكانه الأصلي.
- تثبيت الجسم.من أجل حماية محتويات الهيكل بالكامل بشكل موثوق ، من الأفضل استخدام غلاف PVC. في الوقت نفسه ، يمكن عمل شقوق عليها حتى يتم تصويرها بشكل أفضل. غطاء السكن مرفق بالمغناطيس. من الناحية المثالية ، يجب أن يكون هناك ما لا يقل عن 8 منهم (نرحب بالاختلافات التي يتم استخدام المزيد منها).
المواد اللازمة
لصنع مكنسة كهربائية روبوتية بيديك ، ستحتاج إلى المواد التالية:
- "Arduino Pro Mini" هو مركز الدماغ والمعلومات الرئيسي للهيكل بأكمله.
- L298N سلسلة الروبوت مكنسة كهربائية سائق المحرك.
- محول التيار المتردد.
- وحدة مع mosfet ، سيتم من خلالها التحكم في وتيرة تشغيل الفرشاة الأمامية للجهاز.
- 4 حساس الأشعة تحت الحمراءوالتي ستصلح وجود عقبات في مسار المكنسة الكهربائية الروبوتية.
- زوج من المفاتيح التي ستغير اتجاه حركة الجهاز في حالة حدوث تصادم.
- 3 عجلات كروية.
 عجلات مكنسة كهربائية منزلية الصنع
عجلات مكنسة كهربائية منزلية الصنع - المحرك الذي يوفر دوران الفرشاة في أوضاع مختلفة.
- محرك عالي القدرة يضمن الأداء الطبيعي للتوربين.
- 4 بطاريات ليثيوم أيون ووسيلة للتحكم فيها.
- قاعدة الخشب الرقائقي بالحجم المطلوب.
- جسم كلوريد البوليفينيل بالحجم المناسب.
- 8 أزواج من المغناطيس للتثبيت.
- الأسلاك والكابلات والمفاتيح وغيرها من عناصر الشبكة الكهربائية.
على مدار الوقت الماضي ، تغير الروبوت بشكل خطير. كما وعدت ، أريد مشاركة بعض التحسينات.
إذن ما الذي تم إنجازه:
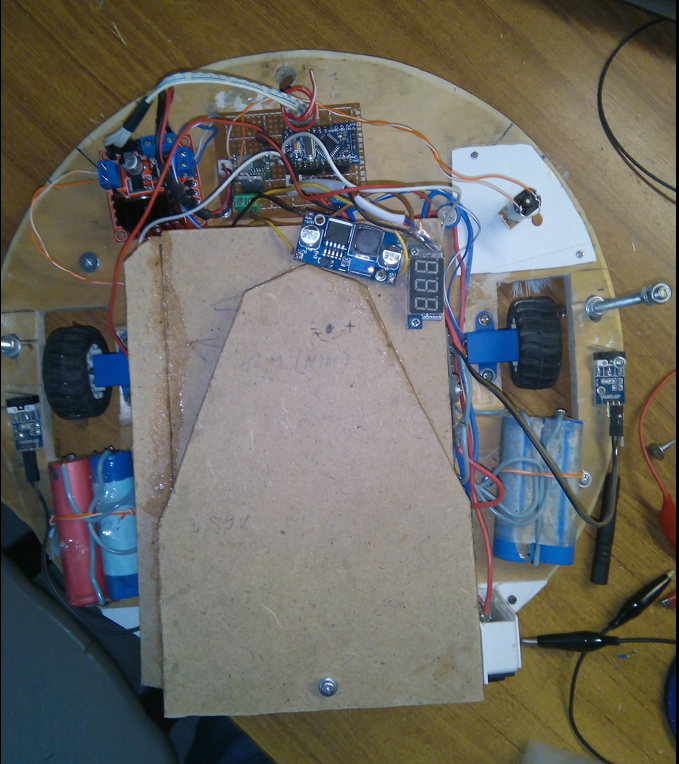
1. بدلاً من قاعدة من الورق المقوى ، أصبحت الآن دائرة من الخشب الرقائقي بقطر 9 مم - وهذا جعل من الممكن إصلاح جميع أجزاء بئر الروبوت ، باستخدام مسامير عادية ، وليس روابط.
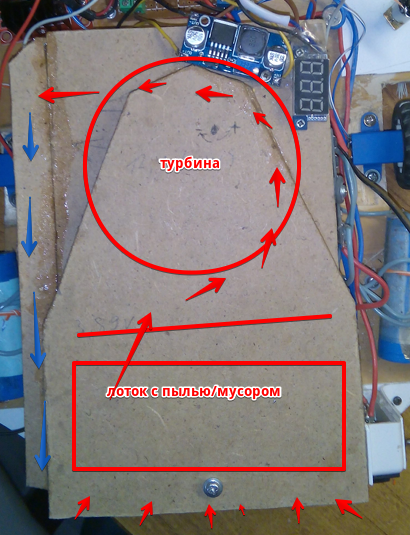
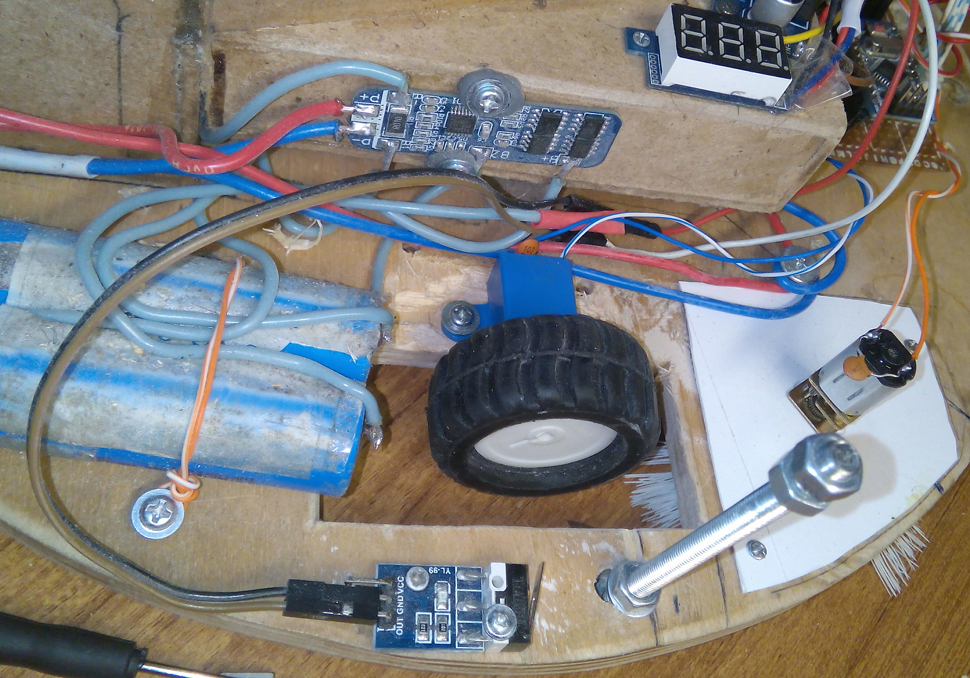
2. بعد ذلك تم تغيير وحدة المكنسة الكهربائية. تركت المحرك والتوربين على حالهما ، لكنني لم أضعهما في "فطيرة" ، لكنني قمت بنقل التوربين إلى مقدمة الهيكل. لم أر شيئًا مثل هذا في المنزل. جعلت هذه الحيلة من الممكن تقليل ارتفاع المكنسة الكهربائية إلى 8.5 سم ، والآن تزحف تحت بعض الخزانات. يتم إعادة تجميع جسم المكنسة الكهربائية نفسها من اللوح الليفي الرفيع.
كان لابد من إزالة الهواء "العادم" خارج العلبة نظرًا لحقيقة أنه حتى بعد المرشح كان متربًا تمامًا ، وتناثر كل هذا الغبار مباشرة على المحرك الأيسر. لقد علقت أيضًا "مؤقتًا" لوحة تصعيد DC / DC على العلبة لزيادة جهد إمداد التوربين. جهد الدخل + 12V ، لكن هذا لا يكفي للشفط الواثق للأوساخ المتوسطة / الكبيرة. بجهد يبلغ حوالي +16 فولت ، يكون الجر كافياً بالفعل. يمكنك رفعه إلى أعلى ، ولكن بعد ذلك ستزداد الضوضاء. لقد قمت أيضًا بتوصيل مقياس الفولتميتر بجسم المكنسة الكهربائية (مرة أخرى "مؤقتًا") لتحديد الشحنة الحالية للبطاريات تقريبًا.
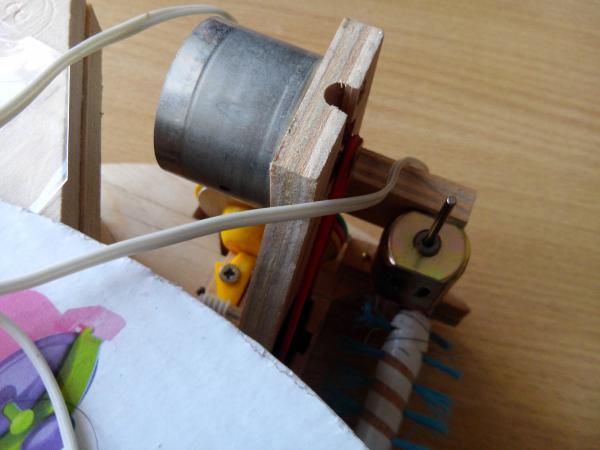
3. كانت المحركات ذات التروس "الصفراء" هي التالية تحت التوزيع. إنها غير مناسبة بسبب ارتفاع مستوى الضوضاء. نعم ، ولم أنجح في تقليل السرعة على هذه المحركات دون أن أفقد عزم الدوران - اندفع الروبوت في جميع أنحاء الغرفة ، وأخاف القطة)
على الإنترنت ، صادفت محركات N20 صغيرة ، قررت استخدامها.
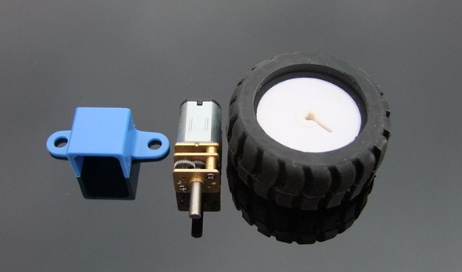
لكن حدثت مشكلتان لهم: لسبب ما ، أرسل لي البائع كلا المحركين بنسب تروس مختلفة ، وعندما تم تثبيتهما على المنصة ، اتضح أنهما صاخبان جدًا ، بل أسوأ من محركات التروس الصينية الصفراء. على الأرجح ، يمكن تقليل الضوضاء عن طريق عمل نوع من "المثبط" بين المحرك والجسم ، لكنني الآن توقفت عن البحث عن محركات أخرى ، على الرغم من توقف الروبوت عن الاندفاع حول الغرف مثل الجنون). كنت أجرب ، أحرقت وحدة تحكم صغيرة لمحركات التروس ، وفي النهاية وضعت نفس L298N.
5. المصد الأمامي. اضطررت إلى العبث بها ، تجربة العديد من الخيارات المختلفة. نتيجة لذلك ، استقرت على penoplex

لقد قمت أيضًا بتثبيت أبسط مفاتيح الحد كأجهزة استشعار للجدار. لم تكن هناك حاجة إلى نوابض إضافية - الأزرار مرنة بما يكفي لإعادة المصد إلى الخلف بعد ملامسة أحد العوائق.
6. تم تركيب وحدة تحكم BMS لـ 3 بنوك ليثيوم. في البداية كنت أرغب في وضع 4 ، لكن نظام إدارة المباني لـ 4 بنوك كان معيبًا ، حتى ، مرة أخرى ، "مؤقتًا" ، تركته على هذا النحو

والنتيجة هي مكنسة كهربائية روبوتية جيدة الميزانية وبسيطة ولكنها صاخبة للغاية.
إذا أخبرني القراء عن المحرك / علب التروس الأفضل استخدامًا ، فسأكون ممتنًا. نحن بحاجة إلى ثورات هادئة ، مدعومة بجهد 3-12 فولت ، حوالي 60 دورة في الدقيقة. شكرا.



