المؤدي الروبوت. الخوارزميات المساعدة
1. تواصل العبارات.
أ) المؤدي هوكائن ما (بشري ، حيوان ، جهاز تقني) قادر على تنفيذ مجموعة معينة من الأوامر.
ب) المنفذ الرسمي -المنفذ الذي ينفذ دائمًا نفس الأمر بنفس الطريقة.
ج) المؤدي غير الرسمي- مؤد يمكنه تنفيذ أمر واحد بطرق مختلفة.
د) الإدارةعملية التأثير الهادف لبعض الأشياء على الآخرين. المنفذون هم من عناصر السيطرة.
ه) الخوارزميةوصف دقيق لتسلسل الإجراءات المخصصة لفناني معين بهدف حل المهمة.
2. أعط أمثلة:
أ) فناني الأداء غير الرسميين:
طالب ، مبرمج ، طبيب ، كلب.
ب) المنفذون الرسميون:
مسجل شرائط ، تلفزيون ، كمبيوتر
3. برنامج Performer Culinary مخصص لقلي الكعك. تعتبر الكيكة جاهزة إذا تم قلي كل جانب لمدة دقيقة واحدة.
وسيط المؤدي عبارة عن مقلاة توضع عليها كعكتين.
يتم عرض نظام أوامر المنفذ في الجدول:
نظام فشل المنفذ على النحو التالي. يحدث رفض "أنا لا أفهم" عندما يُعطى المؤدي الأوامر "المكان 3" ، "الدور 3" ، إلخ ؛ هذه الأوامر ليست في SKI الخاص بفنان الأداء Culinar. يحدث فشل "لا يمكن" عند محاولة قلي جانب واحد مرتين. لفناني الطبخ ، أنشئ خوارزمية:
أ) طهي 4 كعكات في 4 دقائق:
ب) طهي 5 كعكات في 5 دقائق:
ضع 1 ، مكان 2 ، انتظر ، اقلب 1 ، اقلب 2 ، انتظر ، أزل 1 ، أزل 2.
ضع 1 ، انتظر ، قلب 1 ، مكان 2 ، انتظر ، أزل 1 ، قلب 2 ، مكان 1 ، انتظر ، أزل 2 ، قلب 1 ، انتظر ، أزل 1.
4. تجمع إيفان تساريفيتش للقتال مع الثعبان جورينيش ، بثلاثة رؤوس وثلاثة أذرع.
قال له بابا ياجا: "ها هو سيف لك ،". "بضربة واحدة ، يمكنك قطع رأس واحد ، أو رأسين ، أو ذيل واحد ، أو ذيلان. تذكر: إذا قطعت رأسًا ، سينمو رأس جديد ؛ إذا قطعت ذيلًا ، سينمو رأسان جديدان ؛ إذا قطعت ذيلين ، سينمو رأس ؛ إذا قطعت رأسين ، فلن ينمو شيء الى الخلف."
ما هي الضربات وبأي تسلسل يجب أن يلحقها إيفان تساريفيتش بقطع كل الرؤوس وكل ذيول الثعبان في أسرع وقت ممكن؟
قدم حل المشكلة في شكل جدول.

5. اقرأ بعناية نص الفقرة 3.1 "الخوارزمية - نموذج لنشاط منفذ الخوارزميات." لماذا تعتقد أنه سمي بهذه الطريقة؟

6. صف الفنان رسام.
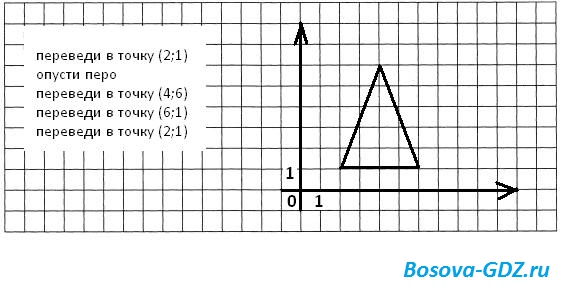
تم تصميم Artist Draughtsman لإنشاء رسومات على مستوى الإحداثيات.
7. قم بتكوين خوارزمية لرسم مثلث متساوي الساقين للرسام ، إذا كانت إحداثيات نهايات المقطع ، وهي ارتفاعه (4 ، 1) و (4 ، 6) ، وكذلك الإحداثيات (2 ، 1) من أحد الرؤوس ، معروفة.
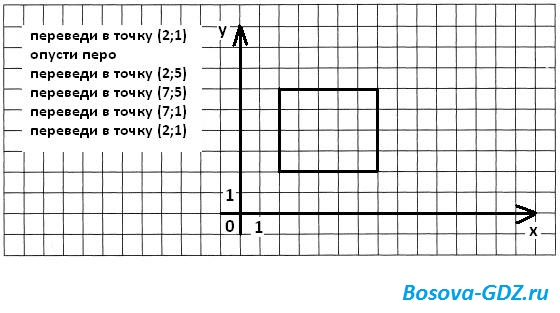
8. كوّن للرسام خوارزمية لرسم مستطيل بأضلاعه موازية لمحاور الإحداثيات ، إذا كانت إحداثيات رأسيه (2 ، 1) و (7 ، 5) معروفة.
9. كوّن للرسام خوارزمية لرسم المعين ، مركزه عند النقطة (5 ، 5) ، الأقطار موازية لمحاور الإحداثيات ، وأطوالها تساوي 8 و 4 وحدات.

10. قم بتكوين خوارزمية للتحكم في الرسام ، ونتيجة لذلك سيتم رسم مربع على مستوى الإحداثيات ، وطول ضلعه يساوي وحدتين.

11. قم بإنشاء خوارزمية للتحكم في الرسام ، ونتيجة لذلك سيتم رسم مستطيل على مستوى الإحداثيات ، أطوال أضلاعه تساوي 3 و 4 وحدات.
![]()
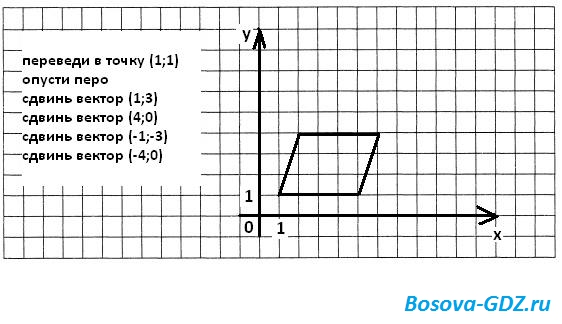
12. قم بإنشاء خوارزمية للتحكم في الرسام ، ونتيجة لذلك سيتم رسم متوازي أضلاع تعسفي على مستوى الإحداثيات.
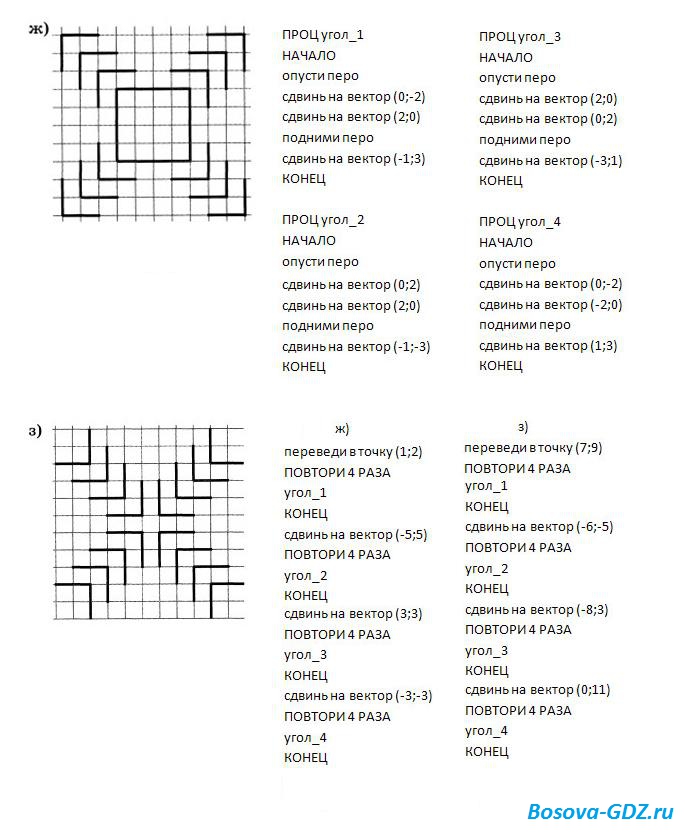
13. قم بعمل خوارزميات لرسم الأشكال الموضحة أدناه بحيث لا ينفصل القلم عن الورق أثناء عملية الرسم ولا يتم رسم خط واحد مرتين.

14. ابحث في الفقرة 3.2 "إدارة المنفذ الصياغة" عن إجابة السؤال "ما الذي يستطيع الرسام تعلمه؟"

15. رتب في شكل خوارزميات إجراءات لرسم الحروف M ، I ، R. قم بعمل خوارزميات لرسم الكلمات WORLD ، ROME ، MIM.

16. تطوير خوارزمية مساعدة لرسم المنزل. بناءً عليه ، قم بتكوين الخوارزمية الرئيسية لرسم شارع من خمسة منازل.

17. أعط مثالا لحالة الحياة التي يكون من المناسب استخدام دورة "تكرار n مرات".
طلاء الجسم في المصنع.
الحصاد في الحقول.
حبل القفز.
سحب المنبثقة على العارضة.
18. عمل خوارزميات التحكم للرسام ، وبعد تنفيذها سيتم الحصول على الرسومات التالية.

19. عمل خوارزميات التحكم للرسام ، وبعد تنفيذها سيتم الحصول على الرسومات التالية.
20. تعال إلى المهام الخاصة بك للرسام.

21. وصف الروبوت المؤدي.
يعمل Executor Robot في حقل مستطيل الشكل. يمكن أن تقع الجدران بين بعض خلايا المجال. قد تكون بعض الخلايا مظللة. يشغل الروبوت خلية واحدة من الحقل.
22. أعط جميع خوارزميات الأوامر الثلاثة التي ستنقل الروبوت من موقعه الأصلي إلى النقطة B.

23. جاء ماشا بنمط للروبوت. قامت Kolya بمسح نصف الخلايا المظللة بالضبط. قم باستعادة الرسم مع العلم أنه متماثل حول المحور الرأسي. اكتب برنامجًا للروبوت.

24. اكتب برنامجًا يمكن للروبوت من خلاله الوصول إلى الخلية B في جميع المتاهات الثلاثة.

حقا
الطريق
إلى اليسار
الطريق
حقا
الطريق
الطريق
إلى اليسار
25. اكتب برنامجًا لنقل الروبوت إلى الخلية ب.

26- هناك خوارزميتان مساعدتان للروبوتات معروفتان:

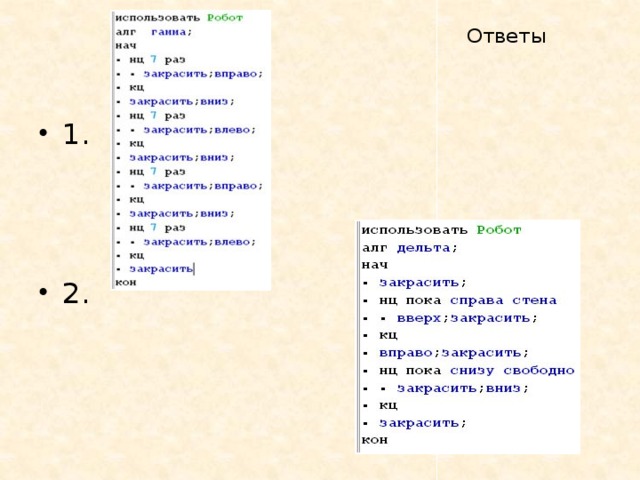
27. اصنع خوارزميات يقوم الروبوت بموجبها برسم الخلايا المحددة.

28. أعط مثالا لحالة الحياة التي يكون من المناسب استخدام حلقة "وداعا".
اهزم العدو حتى يستسلم.
قم بطلاء السياج حتى يتم طلاؤه.
أطلق النار على الهدف حتى تصيبه.
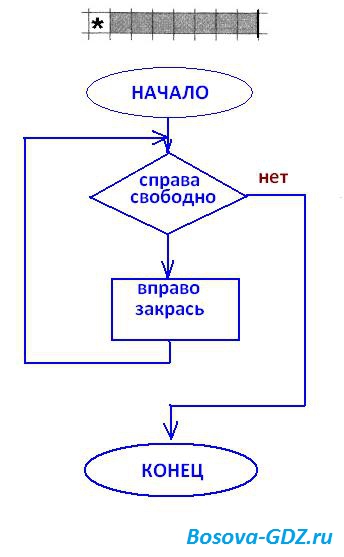
29. من المعروف أنه يوجد جدار في مكان ما على يمين الروبوت.
ارسم مخطط كتلة للخوارزمية ، تحت سيطرته سيرسم الروبوت على عدد من الخلايا حتى الحائط ويعود إلى موضعه الأصلي.
30. من المعروف أنه في مكان ما على يمين الروبوت توجد خلية مظللة.
قم بعمل خوارزمية ، تحت سيطرتها سوف يقوم الروبوت برسم عدد من الخلايا حتى الخلية المظللة والعودة إلى موقعها الأصلي.

31. من المعروف أن الروبوت يقع بالقرب من المدخل الأيسر للممر الأفقي.
قم بعمل خوارزمية ، تحت سيطرتها سوف يرسم الروبوت على جميع خلايا هذا الممر ويعود إلى موقعه الأصلي.

32. من المعروف أن الروبوت موجود في مكان ما في الممر الأفقي. لم يتم رسم أي من غرف الممر فوقها.
قم بعمل رسم تخطيطي للخوارزمية ، بحيث يقوم الروبوت تحت سيطرته برسم جميع خلايا هذا الممر والعودة إلى موقعه الأصلي.

33. في صف من عشر خلايا على يمين الروبوت ، بعض الخلايا مظللة:

ب) اصنع خوارزمية (اكتب برنامجًا) ، تحت سيطرتها سيرسم الروبوت الخلايا واحدة أعلى وأخرى أسفل كل خلية مظللة.
كرر 10 مرات
حقا
إذا ظلل بعد ذلك
الطريق
رسم أكثر
فوق
فوق
رسم أكثر
الطريق
النهاية
النهاية
34. اكتب برنامجًا يمكن للروبوت من خلاله الوصول إلى الخلية D في جميع المتاهات الثلاثة.

إذا تركت حرة ثم
إلى اليسار
الطريق
حقا
الطريق
حقا
خلاف ذلك؛ إذا كان أدناه مجانيًا ،
الطريق
حقا
فوق
حقا
الطريق
حقا
فوق
خلاف ذلك؛ إذا كان الحق مجانيًا إذن
حقا
حقا
حقا
فوق
فوق
فوق
إلى اليسار
الطريق
الطريق
إلى اليسار
إلى اليسار
فوق
فوق
حقا
النهاية
35. اكتب برنامجًا ، وبعد ذلك ، سيتمكن الروبوت من السير على طول الممر من الزاوية اليسرى السفلية للحقل إلى أعلى اليمين. يبلغ عرض الممر خلية واحدة ويمتد في الاتجاه من اليسار إلى الأسفل إلى اليمين لأعلى. يظهر مثال على ممر محتمل في الشكل.

عندما يكون الجزء العلوي مجانيًا أو مجانيًا
فعل
إذا كان أعلاه مجانيًا ، فعندئذٍ
فوق
خلاف ذلك
حقا
النهاية
النهاية
36. اقرأ بعناية نص الفقرة 3.3 "التحكم في منفّذ الروبوت". اجب على الاسئلة التالية:
1) ما هو القاسم المشترك بين حلقات "تكرار ن مرات" و "وداعا"؟
2) ما هي الاختلافات بينهما؟
3) هل يلزم بناءان لوصف الإجراءات المتكررة؟

37. قارن قدرات منفذي الرسام والروبوت.
الروبوت هو برنامج أكثر شمولاً ، لأنه الرسام يمكنه الرسم فقط. يمكن للروبوت استخدام حلقة "bye" ، ويمكن للرسام استخدام "تكرار n مرة".
38. كتابة المفاهيم الأساسية "الخوارزمية" الفصل 3 وإعطاء تعريفاتها.
المنفذ- شخص أو مجموعة من الأشخاص أو حيوان أو جهاز تقني قادر على تنفيذ أوامر محددة. هناك فنانين غير رسميين ورسميين.
المؤدي غير الرسمي- يمكن تنفيذ نفس الأمر بطرق مختلفة ، رَسمِيّ- دائما نفس الشيء. لكل منفذ رسمي ، يمكنك تحديد نطاق المهام المطلوب حلها ، والبيئة ، ونظام الأوامر ، ونظام الإخفاقات وأنماط التشغيل.
الخوارزمية- هذا وصف دقيق لتسلسل الإجراءات التي تهدف إلى حل المهمة ، المخصصة لفناني معين. الخوارزمية هي نموذج لنشاط منفذ الخوارزمية.
الخوارزمية المساعدةهي خوارزمية تحل بعض المشاكل الفرعية للمشكلة الرئيسية.
الخوارزمية الخطية- خوارزمية يتم فيها تنفيذ الأوامر بالترتيب الذي كُتبت به ، أي تباعا واحدا تلو الآخر.
نظام قيادة الأداء (SCI)- قائمة بجميع الأوامر التي يمكن لفنان معين تنفيذها.
دورة (التكرار)- شكل من أشكال تنظيم الإجراءات حيث يتم تكرار تنفيذ نفس تسلسل الأوامر (جسم الحلقة) حتى يتم استيفاء بعض الشروط المحددة مسبقًا. إذا كان عدد مرات تكرار جسم الحلقة معروفًا مسبقًا ، فيمكنك استخدام حلقة "تكرار n مرة". إذا كان عدد مرات تكرار جسم الحلقة غير معروف مسبقًا ، فاستخدم حلقة while.
المتفرعة- شكل من أشكال تنظيم الإجراءات يتم فيه ، اعتمادًا على الوفاء أو عدم الوفاء بشرط معين ، تنفيذ إما تسلسل واحد أو آخر من الإجراءات.
برنامج كومير
فنان روبوت

من هو مؤد الروبوت؟
- تخيل حقلاً متقلبًا (مثل ورقة من دفتر ملاحظات في صندوق) حيث يوجد كائن ، والذي سنسميه روبوتًا. باستخدام أوامر خاصة ، يمكننا التحكم في هذا الروبوت - تحريكه حول الخلايا ، والطلاء فوق الخلايا. وفي معظم الحالات ، ستكون مهمتنا كتابة مثل هذا البرنامج للروبوت ، وتنفيذه سوف يرسم على خلايا معينة.

إعداد بيئة المعبود لعامل الروبوت
- برنامج Kumir الذي تم إطلاقه يبدو هكذا.

بداية بيئة الروبوت
- قبل البدء في تنفيذ البرنامج ، من الضروري ضبط بيئة البداية لمنفذ الروبوت. وهذا يعني وضع الروبوت في الموضع الصحيح ، ووضع الجدران ، والطلاء فوق الخلايا الصحيحة ، وما إلى ذلك. هذه الخطوة مهمة للغاية. إذا تجاهلت ذلك ، فقد لا يعمل البرنامج بشكل صحيح أو حتى يتعطل.

يضعط تحرير البيئة


المؤدي الروبوت. أوامر بسيطة.
- فوق
- الطريق
- إلى اليسار
- حقا
- رسم أكثر
نتيجة تنفيذ هذه الأوامر واضحة من اسمها:
- لأعلى - حرك الروبوت خلية واحدة لأعلى
- لأسفل - حرك الروبوت بمقدار خلية واحدة لأسفل
- على اليسار - حرك الروبوت خلية واحدة إلى اليسار
- على اليمين - حرك الروبوت خلية واحدة إلى اليمين
- الطلاء فوق الخلية الحالية (الخلية التي يوجد بها الروبوت).

مثال الخوارزمية
- تحتاج أولاً إلى كتابة العبارة:
- استعمال إنسان آلي
إذا كان معروفًا عدد الخلايا التي يجب رسمها ، فستكون خوارزمية الحل على النحو التالي!

رقم المهمة 1
- اكتب برنامجًا لحل المشكلة التالية ، إذا كنت تعرف عدد الخلايا المراد رسمها

دورات
- 1. حلقة مع عداد تستخدم عندما يكون معروفًا مسبقًا عدد التكرارات التي يجب إجراؤها.
وقت nc
…
عقدة
هنا يجب تحديد عدد التكرارات (عدد) والأوامر التي سوف تتكرر. يتم استدعاء الأوامر التي تتكرر في دورة دورة الجسم.


رقم المهمة 2
- اكتب برنامجًا لحل المشكلة التالية باستخدام حلقة مع عداد

- 2. حلقة مع الشرط- عندما يكون الشرط صحيحًا ، تكون الحلقة صحيحة ، وإذا كانت خاطئة ، فهي ليست صحيحة
- هناك عدة شروط لأداء الروبوت
أعلى فضفاضة
أسفل فضفاضة
ترك مجانا
حق مجاني
أعلى الجدار
الجدار السفلي
الجدار الأيسر
الجدار الأيمن
- يمكنك استخدام الجسيمات: لا ، و ، أو

هيكل الحلقة الشرطية
nts وداعا حق مجاني
حقا
رسم أكثر
عقدة


رقم المهمة 3
- اكتب برنامجًا لحل المشكلة التالية باستخدام حلقة شرطية:

رقم المهمة 4
- اكتب برنامجًا لحل المشكلة التالية باستخدام الحلقات الشرطية:



حل المشاكل:
- 2. يجب نقل الروبوت من موضع البداية إلى الوضع النهائي ، وذلك بطلاء الجدران

رقم المهمة 5
- يوجد جدار أفقي في الحقل اللامتناهي. طول الجدار غير معروف. الروبوت أعلى الجدار عند نهايته اليسرى. يوضح الشكل موقع الروبوت بالنسبة للجدار (يشار إلى الروبوت بالحرف "P"):

الإجابة على المهمة رقم 5
- ncليس بعد (الجزء السفلي مجاني)
رسم أكثر
يتم كتابة بداية الدورة (nts) والشرط (ليس بعد (أسفل)) في سطر واحد.


تصميم إذا
- أعلى حرة أسفل حرة اليسار حرة الحق الحرة
- يمكن استخدام هذه الأوامر مع الشرط "إذا"، بالشكل التالي:
- إذا حالة ومن بعد
- تسلسل الأوامر
- على سبيل المثال ، لنقل خلية واحدة إلى اليمين ، إذا لم يكن هناك جدار على اليمين ، ورسم الخلية ، يمكنك استخدام الخوارزمية التالية:
- إذا كان الحق مجانيًا إذن
- حقا
- رسم أكثر

رقم المهمة 7
أطوال الجدران غير معروفة.

الإجابة على المهمة رقم 7
حتى يتم تحرير الجزء العلوي
رسم أكثر
حقا
بينما الجزء العلوي مجاني
حقا
بينما الحق مجاني
رسم أكثر
حقا
حتى يتحرر الحق
رسم أكثر
الطريق
بينما الحق مجاني
الطريق
حتى يتحرر الحق
رسم أكثر
الطريق

رقم المهمة 8
أطوال الجدران غير معروفة.
يوجد ممر واحد بالضبط في كل جدار ، الموقع الدقيقالممر وعرضه غير معروفين.

الإجابة على المهمة رقم 8
بينما الجزء العلوي مجاني
حتى يتم تحرير الجزء العلوي
رسم أكثر
بينما الجزء العلوي مجاني
حتى يتم تحرير الجزء العلوي
رسم أكثر
حتى يتم تحرير الجزء السفلي
رسم أكثر
طالما أن الجزء السفلي مجاني
حتى يتم تحرير الجزء السفلي
رسم أكثر

رقم المهمة 9
أطوال الجدران غير معروفة.
يوجد ممر واحد بالضبط في كل جدار ، الموقع الدقيق للممر وعرضه غير معروفين.

الإجابة على المهمة رقم 9
طالما أن الجزء السفلي مجاني
حتى يتم تحرير الجزء السفلي
رسم أكثر
طالما أن الجزء السفلي مجاني
حتى يتم تحرير الجزء السفلي
رسم أكثر
حتى يتم تحرير الجزء العلوي
رسم أكثر
بينما الجزء العلوي مجاني
حتى يتم تحرير الجزء العلوي
رسم أكثر

رقم المهمة 10
أطوال الجدران غير معروفة.
يوجد ممر واحد بالضبط في كل جدار ، الموقع الدقيق للممر وعرضه غير معروفين.

الإجابة على المهمة رقم 10
بينما اليسار مجاني
حتى يتحرر اليسار
رسم أكثر
بينما اليسار مجاني
حتى يتحرر اليسار
رسم أكثر
حتى يتحرر الحق
رسم أكثر
بينما الحق مجاني
حتى يتحرر الحق
رسم أكثر

رقم المهمة 11
أطوال الجدران غير معروفة.
يوجد ممر واحد بالضبط في كل جدار ، الموقع الدقيق للممر وعرضه غير معروفين.

الإجابة على المهمة رقم 11
حتى يتم تحرير الجزء العلوي
حتى يتم تحرير الجزء العلوي
رسم أكثر
طالما أن الجزء السفلي مجاني
حتى يتم تحرير الجزء العلوي
رسم أكثر

رقم المهمة 12
هناك درج على حقل لا نهاية له. ينزل السلم أولاً من اليمين إلى اليسار ، ثم ينزل من اليسار إلى اليمين. ارتفاع كل خطوة خلية واحدة ، والعرض خليتان. الروبوت على يمين الدرجة العلوية للسلالم. عدد الخطوات المؤدية إلى اليسار وعدد الخطوات المؤدية إلى اليمين غير معروفين. يوضح الشكل إحدى الطرق الممكنة لوضع السلم والروبوت (تم تمييز الروبوت بالحرف "P").

الإجابة على المهمة رقم 12
نتحرك أسفل الدرج من اليمين إلى اليسار حتى نصل إلى تقاطع السلالم:
nc بينما الجزء السفلي مجاني
الطريق
إلى اليسار
إلى اليسار
ننتقل إلى نهاية الدرج النازل ، نرسم الخلايا الضرورية في الطريق:
ن ج حتى تركت فضفاضة
رسم أكثر
حقا
رسم أكثر
حقا
الطريق


الإجابة على المهمة رقم 13
nc بينما تركت مجانًا
رسم أكثر
إلى اليسار
فوق
ن ج حتى تركت فضفاضة
رسم أكثر
فوق
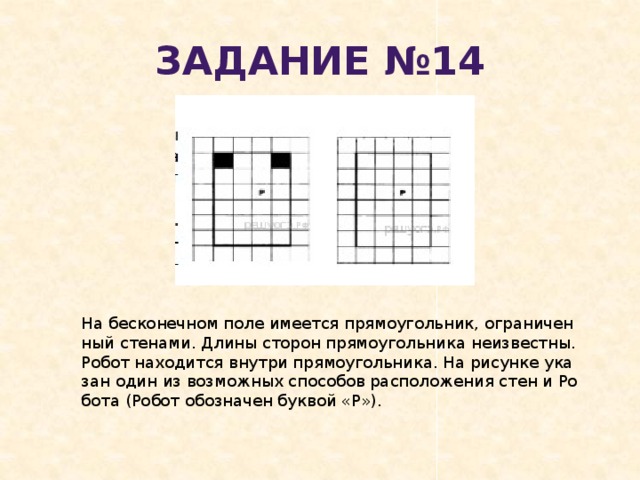
رقم المهمة 14
في حقل لانهائي يوجد مستطيل تحده الجدران. أطوال أضلاع المستطيل غير معروفة. الروبوت داخل المستطيل. يوضح الشكل إحدى الطرق الممكنة لترتيب الجدران والروبوت (يشار إلى الروبوت بالحرف "P").

الإجابة على المهمة رقم 14
بينما الحق مجاني
حقا
بينما الجزء العلوي مجاني
فوق
رسم أكثر
nc بينما تركت مجانًا
إلى اليسار
رسم أكثر


الإجابة على المهمة رقم 15
بينما الحق مجاني
رسم أكثر
حقا
طالما أن الجزء السفلي مجاني
رسم أكثر
الطريق
رسم أكثر
ليس بعد (الجزء السفلي مجاني)
إلى اليسار
الطريق
ليس بعد (حق مجاني)
رسم أكثر
الطريق
رسم أكثر
حقا
ليس بعد (قمة فضفاضة)
رسم أكثر
حقا


الإجابة على المهمة رقم 16
حتى يتحرر الحق
رسم أكثر
الطريق
رسم أكثر
حقا
حتى يتم تحرير الجزء العلوي
رسم أكثر
حقا
بينما الجزء العلوي مجاني
فوق
بينما الحق مجاني
رسم أكثر
حقا
حتى يتحرر الحق
رسم أكثر
الطريق


المؤدي الروبوت. الخوارزميات المساعدة (2 ساعة)
استهداف: تقديم مفهوم الخوارزمية الرئيسية والمساعدة ؛ شرح قواعد استخدام الخوارزمية المساعدة ؛ تحليل أمثلة الخوارزميات باستخدام المساعد. تنمية المهارات العملية في بناء الخوارزميات بطريقة الصقل المتسلسل.
خطة الدرس
1- إدخال مصطلحات جديدة (خوارزمية رئيسية ومساعدة ، استدعاء) وشرح مفاهيم جديدة.
2. تحليل أمثلة لحل المشكلات باستخدام خوارزمية مساعدة.
3. العمل العملي
عند حل بعض المشكلات ، من الملائم تقسيمها إلى مهام فرعية أصغر ، يمكن تصميم كل منها كخوارزمية مستقلة. في هذه الحالة ، يتم أولاً تجميع ما يسمى بالخوارزمية الرئيسية ، حيث يتم استخدام استدعاءات الخوارزميات المساعدة لحل المهام الفرعية ، والتي تتم إضافتها لاحقًا. هذا النوع من الحل يسمى طريقة الصقل المتسلسل. يسمح لمجموعة من المبرمجين بالعمل في مشروع ، بينما يحل كل واحد مهمته الفرعية.
في عملية حل المشكلة ، يمكن ، إذا لزم الأمر ، تقسيم كل خوارزمية مساعدة إلى خوارزميات مساعدة أصغر.
يسمى الأمر بتنفيذ الخوارزمية المساعدة تحدي ومكتوب في جسم الخوارزمية الرئيسية.
يمكن اعتبار نفس الخوارزمية كخوارزمية رئيسية ومساعدة فيما يتعلق بالخوارزميات الأخرى. في لغة خوارزمية ، تتم كتابة الخوارزمية الرئيسية أولاً ، ويتم كتابة الخوارزمية المساعدة في صف أدناه.
مهمة 1:
الروبوت في الزاوية اليسرى العليا من الحقل. لا توجد جدران أو زنازين مظللة. قم بتكوين خوارزمية ، باستخدام خوارزمية إضافية ، ارسم أربعة تقاطعات على خط أفقي واحد. يمكن أن يكون الوضع النهائي للروبوت تعسفيًا.
المحلول
تحليل على السبورة:
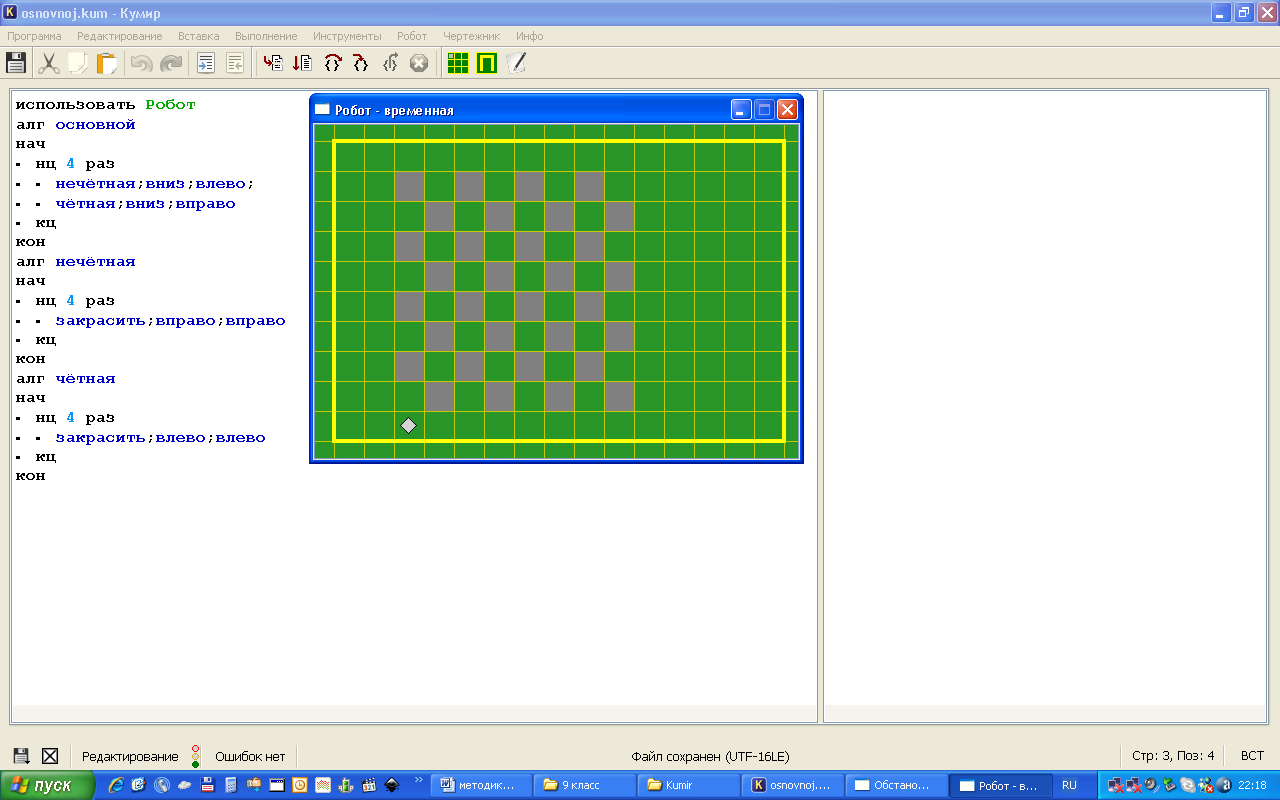
المهمة 2. الروبوت في الزاوية اليسرى العليا من الحقل. لا توجد جدران أو زنازين مظللة. اكتب خوارزمية ترسم مربع 8 × 8 في نمط رقعة الشطرنج.يمكن أن يكون الموضع النهائي للروبوت عشوائيًا.
عمل عملي على جهاز كمبيوتر "حل المشكلات باستخدام الخوارزميات المساعدة"
مهمة 1 . الروبوت في الركن الأيسر السفلي من الحقل. لا توجد جدران أو زنازين مظللة. اكتب خوارزمية ترسم 6 خطوط عمودية بنفس الطول في 6 خلايا. يمكن أن يكون الوضع النهائي للروبوت تعسفيًا.
المهمة 2 . باستخدام المساعد ، اكتب خوارزمية للرسم فوق الخلايا التي تشكل الرقم 1212.
الواجب المنزلي
: ابتكر خوارزمية ترسم الصورة التالية: تطبيق خوارزميتين مساعدتين لحل المشكلة. 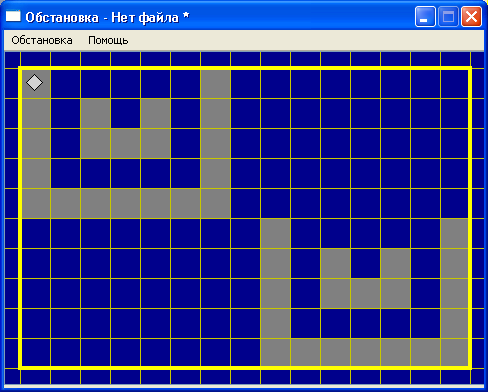
التطوير المنهجي في المعلوماتية.
الموضوع: "مؤدي الروبوت في برنامج KuMir في دروس المعلوماتية"
مدرس تكنولوجيا "المعلوماتية وتكنولوجيا المعلومات والاتصالات"
ملاحظة توضيحية
هدف التنمية: لدراسة إمكانيات البرمجة على مثال روبوت منفذ معين باستخدام بيئة KUMIR ؛ إعطاء مهارات عملية للعمل مع المؤدي.
التطوير المنهجيتم تجميعها لدروس المعلوماتيةتدرب على الكمبيوتر: يعمل مع المنفذ التربويالخوارزميات. وضع خوارزميات خطية ومتفرعة ودورية لإدارة المنفذ ؛ وضع خوارزميات ذات بنية معقدة ؛ استخدام الخوارزميات المساعدة (الإجراءات ، الإجراءات الفرعية).
يجب أن يعرف الطلاب:
- ما هو المؤدي روبوت SKI ، روبوت يوم الأربعاء ؛
- ما هي الخوارزميةما هي الخصائص الرئيسية للخوارزمية؟
- طرق كتابة الخوارزميات: مخططات انسيابية ، لغة خوارزمية تعليمية ؛الإنشاءات الخوارزمية الأساسية: التالية ، المتفرعة ، الحلقة ؛ الهياكل
- الخوارزميات. ⇒ تخصيص الخوارزميات المساعدة ؛ تقنيات بناء الخوارزميات المعقدة:
يجب أن يكون الطلاب قادرين على:
- فهم أوصاف الخوارزميات في لغة خوارزمية التعلم ؛
- إجراء تتبع خوارزمية لفنان معروف ؛
- تكوين خوارزميات تحكم خطية ومتفرعة ودورية لمنفذ الروبوت ؛ تخصيص المهام الفرعية تحديد واستخدام الخوارزميات المساعدة.
الجلسة 1 (ساعتان) الدرس 1.
المؤدي الروبوت.نظام أوامر المنفذ.
خطة الدرس.
- وصف UCS للمنفذ ، بيئة المنفذ.
2. تحليل خوارزميات الروبوت النموذجية.
خلال الفصول.
ضع في اعتبارك وصف المؤدي.
بيئة المنفذ: Performer الروبوت قادر على التحرك عبر المتاهة ، مرسومًا على مستوى مقسم إلى خلايا.
روبوت SKI : أوامر بسيطة: أعلى ، أسفل ، يسار ، يمين ، لون.
أوامر المنطق: (تدقيق الشرط)
أعلى مجانا أسفل مجانا
ترك الحق الحر مجانا.
الروابط المنطقية: AND، NOT، OR:
مثال: (ليس اليسار مجانيًا) أو (ليس حقًا مجانيًا)
قيادة الفرع: أمر الدورة:
إذا الشرط ثم nts حين الشرط
سلسلة من الاوامر سلسلة من الاوامر
كل kts
(في CIMs لعام 2009 ، اختلفت أوامر الروبوت عن تلك المألوفة للأطفال ، مما أدى إلىارتباك :)
قيادة الفرع: أمر الدورة:
إذا الشرط ثم nts حينما تفعل الشرط
سلسلة من الاوامر سلسلة من الاوامر
نهاية النهاية
منظر عام لنافذة برنامج كومير. البيئة الرسومية للروبوت:
في KIMs النسخة التجريبيةتم تغيير تنسيق أمر 2010 إلىمعتاد
ترتيب إنشاء الخوارزمية:
1- الفرق أدوات - تحرير بيئة البدايةارسم الجدران في حقل الروبوت واضبط الروبوت على موضعه الأولي.
2- الأوامر الروبوت - تغيير بيئة البدايةحفظ البيئة الجديدة.
3. الأوامر لصق- استخدام الروبوتحدد الفنان.
4. في نافذة المستند ، اكتب الخوارزمية باستخدام القائمةإدراج.
5. تنفيذ الأوامر - التنفيذ بشكل مستمر (أو خطوة بخطوة) قم بتشغيل الخوارزمية.
6. النظر في نتيجة تنفيذ الخوارزمية ، وإذا لزم الأمر ، تصحيحها.
الدرس 1 (2 ساعة) الدرس 2.
العمل التطبيقي "تجميع الخوارزميات الخطية.
المهام: 1. إنسان آلي في نقطة عشوائية في الميدان. قم بتلوين الخلية أعلى موضع البداية وأسفله وعلى يمينه.
- روبوت في نقطة اعتباطية في الميدان. انقل الروبوت 4 مسافات إلى اليمين ، وقم بالطلاء عليها.
- قم بإنشاء بيئة بداية جديدة عن طريق رسم مربع مكون من 4 خلايا على السبورة. احفظ البيئة كبداية.
- قم بإنشاء بيئة انطلاق جديدة من خلال رسم ممر به ممرات في الجدران في الحقل. احفظ البيئة كموقع. قم بتغيير بيئة البداية إلى البيئة التي تم إنشاؤها حديثًا.
الجلسة 2 (ساعتان) الدرس 1.
عنوان : التفريع والتنقيح المتسلسل للخوارزمية.
تحليل مهام CIM باستخدام المنفذ الآلي.
استخدم الروبوت
alg kim 2009
مبكر
إن لم يكن أسفل فضفاضة
ثم إلى اليمين
الكل
إن لم يكن أسفل فضفاضة
ثم إلى اليمين
الكل
إن لم يكن أسفل فضفاضة
ثم إلى اليمين
الكل
يخدع
استخدم الروبوت
alg kim 2010
مبكر
إن لم يكن أسفل فضفاضة
ثم إلى اليمين
الكل
إن لم يكن أسفل فضفاضة
ثم إلى اليمين
الكل
إن لم يكن أسفل فضفاضة
ثم إلى اليمين
الكل
يخدع
إلخ. عبد. رقم 14. تجميع وتصحيح الخوارزميات المتفرعة
مهام. انظر المرفق.
الدرس 3. الخوارزميات الدورية. الدرس 1-2
استهداف: الكشف عن جوهر مفهوم الدورة في الخوارزميات ، وإظهار أشكال دورات الكتابة في الخوارزميات ، وإعطاء المهارات في إنشاء وكتابة الخوارزميات الدورية.
إلخ. عبد. رقم 15. تجميع وتصحيح الخوارزميات الدورية
1. قم بعمل خوارزمية ترسم جميع الخلايا الداخلية المجاورة للجدار.
استخدم الروبوت
alg
مبكر
nc بينما الحق مجاني
رسم أكثر؛ حقا
عقدة
nc بينما الجزء السفلي مجاني
رسم أكثر؛ الطريق
عقدة
ن ج حتى الجزء السفلي فضفاضة
رسم أكثر؛ إلى اليسار
عقدة
يخدع
2. قم بإنشاء خوارزمية تملأ جميع الخلايا بين الروبوت والجدار. المسافة إلى الجدار غير معروفة.
استخدم الروبوت
alg
مبكر
nc بينما الحق مجاني
حقا؛ رسم أكثر
عقدة
يخدع
3. قم بإنشاء خوارزمية ترسم جميع الخلايا بين جدارين.
استخدم الروبوت
alg uch3
مبكر
nc حتى الآن (ليس أعلى فضفاض) أو (ليس أسفل فضفاض)
حقا
إذا (ليس من أعلى مجانًا) و (ليس خاليًا من الأسفل)
ومن بعد
رسم أكثر
الكل
عقدة
يخدع
4. قم بإنشاء خوارزمية تملأ جميع الخلايا حول جدار مستطيل.
alg uch4
مبكر
الطلاء ؛ حتى
nc حتى الحق فضفاضة
الطلاء ؛
عقدة
الطلاء ؛ حق
ن ج حتى الجزء السفلي فضفاضة
الطلاء ؛ حق
عقدة
الطلاء على ؛ أسفل
ن ج حتى تركت فضفاضة
طلاء [عامة]
عقدة
الطلاء ؛ اليسار
nc حتى قمة فضفاضة
رسم أكثر؛ اليسار؛
عقدة
يخدع
استخدم الروبوت
alg uch5
مبكر
حقا
ن ج حتى الجزء السفلي فضفاضة
رسم أكثر؛ حقا
عقدة
رسم أكثر؛ الطريق
nc بينما تركت مجانًا
رسم أكثر؛ إلى اليسار
عقدة
ن ج حتى تركت فضفاضة
رسم أكثر؛ الطريق
عقدة
الطلاء ؛ اليسار ؛ الطلاء ؛ فوق؛
nc بينما أعلى مجانا
رسم أكثر؛ فوق
عقدة
nc حتى قمة فضفاضة
رسم أكثر؛ إلى اليسار
عقدة
يخدع
النشاط 4 ، الدرس 1
الخوارزميات المساعدة.
استهداف: تقديم مفهوم الخوارزمية الرئيسية والمساعدة ؛ شرح قواعد استخدام الخوارزمية المساعدة ؛ تحليل أمثلة الخوارزميات باستخدام المساعد.
خطة الدرس
1- إدخال مصطلحات جديدة (خوارزمية رئيسية ومساعدة ، استدعاء) وشرح مفاهيم جديدة.
2. تحليل أمثلة لحل المشكلات باستخدام خوارزمية مساعدة.
عند حل بعض المشكلات ، من الملائم تقسيمها إلى مهام فرعية أصغر ، يمكن تصميم كل منها كخوارزمية مستقلة. في هذه الحالة ، يتم أولاً تجميع ما يسمى بالخوارزمية الرئيسية ، حيث يتم استخدام استدعاءات الخوارزميات المساعدة لحل المهام الفرعية ، والتي تتم إضافتها لاحقًا. هذا النوع من الحل يسمىطريقة الصقل المتسلسل.يسمح لمجموعة من المبرمجين بالعمل في مشروع ، بينما يحل كل واحد مهمته الفرعية.
في عملية حل المشكلة ، يمكن ، إذا لزم الأمر ، تقسيم كل خوارزمية مساعدة إلى خوارزميات مساعدة أصغر.
يسمى الأمر بتنفيذ الخوارزمية المساعدةتحدي ومكتوب في جسم الخوارزمية الرئيسية.
يمكن اعتبار نفس الخوارزمية كخوارزمية رئيسية ومساعدة فيما يتعلق بالخوارزميات الأخرى. في لغة خوارزمية ، تتم كتابة الخوارزمية الرئيسية أولاً ، ويتم كتابة الخوارزمية المساعدة في صف أدناه.
مهمة 1:
الروبوت في الزاوية اليسرى العليا من الحقل. لا توجد جدران أو زنازين مظللة. قم بتكوين خوارزمية ، باستخدام خوارزمية إضافية ، ارسم أربعة تقاطعات على خط أفقي واحد. يمكن أن يكون الوضع النهائي للروبوت تعسفيًا.
المحلول
تحليل على السبورة:
المهمة 2. الروبوت في الزاوية اليسرى العليا من الحقل. لا توجد جدران أو زنازين مظللة. اكتب خوارزمية ترسم مربع 8 × 8 في نمط رقعة الشطرنج.يمكن أن يكون الموضع النهائي للروبوت عشوائيًا.
النشاط 4 ، الدرس 2
عمل عملي على جهاز كمبيوتر "حل المشكلات باستخدام الخوارزميات المساعدة".
استهداف : لغرس المهارات العملية في بناء الخوارزميات بطريقة الصقل المتسلسل.
خطة الدرس
1. تم إكمال المهمة بالكامل بواسطة الكمبيوتر. يتلقى الطلاب المهام ويكملونها في بيئة برامج Kumir. يتم حفظ نتائج العمل كملفات للتحقق لاحقًا.
مهمة 1 . الروبوت في الركن الأيسر السفلي من الحقل. لا توجد جدران أو زنازين مظللة. اكتب خوارزمية ترسم 6 خطوط عمودية بنفس الطول في 6 خلايا. يمكن أن يكون الوضع النهائي للروبوت تعسفيًا.
المهمة 2 باستخدام المساعد ، قم بعمل خوارزمية للرسم فوق الخلايا التي تشكل الرقم 1212.
الواجب المنزلي: ابتكر خوارزمية ترسم الصورة التالية: تطبيق خوارزميتين مساعدتين لحل المشكلة.
النشاط 5 ، الدرس 1-2
اختبار
"تجميع الخوارزمية في بيئة المنفذ الروبوت".
استهداف: لاختبار المعرفة المكتسبة حول الإنشاء والقدرة على تحليل الخوارزميات في بيئة برمجيات كومير.
مهام لـ مراقبة العملمقسمة حسب مستويات الصعوبة وتتضمن 3 مهام مع المنفذ الروبوت (المهمتان 1 و 2 - للتفرع والحلقات ، المهمة 3 - لاستخدام خوارزمية مساعدة.) نصوص المهام معطاة في الملحق.
يتم تسجيل الشروط الأولية والنهائية والخوارزميات التي تم إنشاؤها كملف.
يتم تحديد الدرجة وفقًا لمستوى صعوبة المهمة. للطالب الحق في اختيار نوع المهمة.



